














 6 / 12
6 / 12

А.Ю. Егорушкин, В.И. Мкртчян
6
Инженерный журнал: наука и инновации
# 8·2017
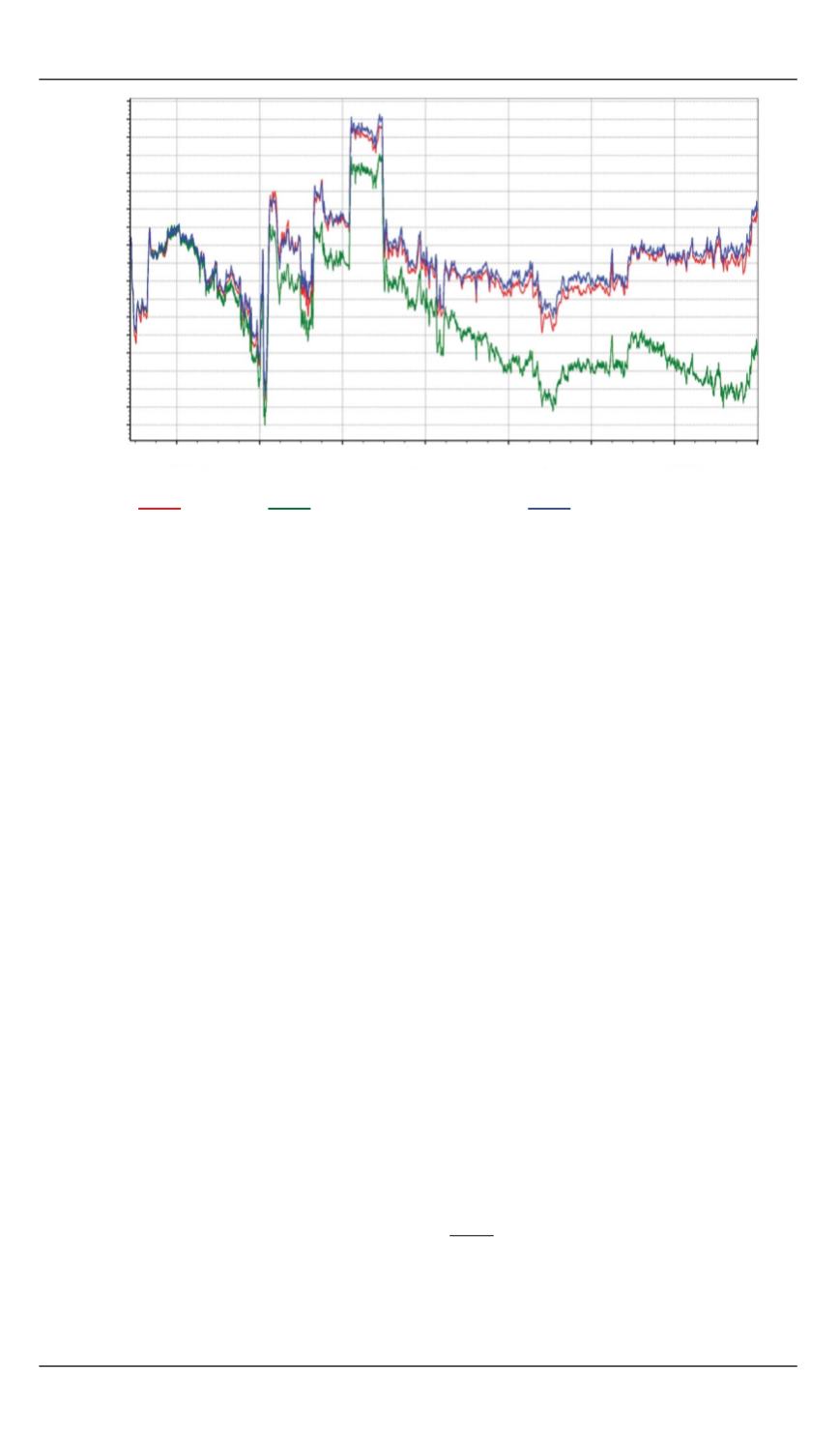
Рис. 4.
Влияние компенсации дрейфа на угол курса
Результаты испытаний показывают, что ошибка по углам тангажа
и крена значительно снизилась (в 2–3 раза). Остаточную ошибку по
курсу оценить трудно, поскольку СНС определяет не географический
курс, а путевой угол, отличающийся на угол сноса. Тем не менее после
компенсации дрейфов датчиков угловой скорости ошибка по курсу не
накапливается с течением времени, как это было в исходном случае.
Недостатком метода 1 является длительное время переходных
процессов. Действительно, по рис. 2 видно, что оценки достигают
установившихся значений через 10…30 мин.
Рассмотрим метод коррекции 2, не обладающий этим недостатком.
Метод 2. Демпфирование бесплатформенной инерциальной
навигационной системы.
Углы
Φ
E
и
Φ
N
характеризуют ошибки
определения местного горизонта. Исследуем характер поведения этих
ошибок на примере угла
Φ
N
. Для этого воспользуемся моделью (1),
исключив влияние угла Φ
Up
. Это правомерно, поскольку рассматри-
вается движение маломаневренного летательного аппарата, ускоре-
ния которого малы. Получаем систему уравнений
Φ ,
E
N
V g
δ =
Φ Φ
,
dr
E
N E Up
N
V
R
δ
= ω + + ω
(3)
0.
dr
N
ω =
190
170
150
130
110
90
70
50
30
10
2000
6000
8000
12 000
10 000
14 000
4000
Время, с
СНС
БИНС, без компенсации
БИНС, с компенсацией
Курс, град