














 5 / 12
5 / 12

Коррекция углов ориентации в бесплатформенных инерциальных навигационных системах
Инженерный журнал: наука и инновации
# 8·2017 5
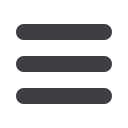
Рис. 2.
Оценки собственных дрейфов датчиков угловой скорости
Полученные оценки можно использовать для компенсации
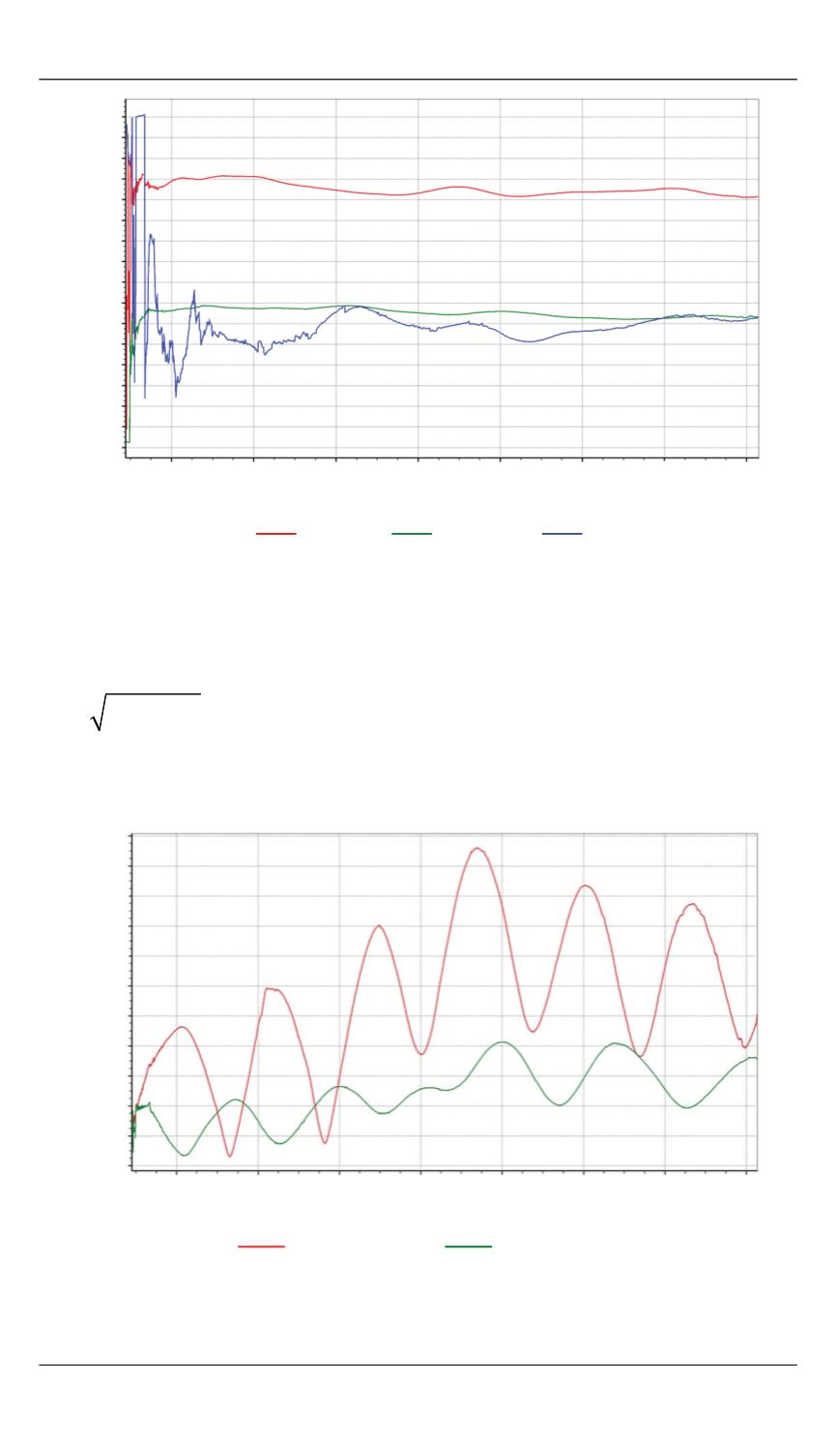
дрейфов датчиков угловой скорости. Влияние компенсации на угол
2
2
Φ Φ Φ
E N
= +
демонстрирует рис. 3, влияние на ошибку по курсу —
рис. 4.
Рис. 3.
Влияние компенсации дрейфа на угол Ф
16
14
12
10
8
6
4
2
–2
–4
–6
–8
–10
–12
–14
–16
0
2000 4000 6000 8000 10 000 12 000 14 000 16 000
ω
dr
yb
ω
dr
zb
ω
dr
xb
Скорость дрейфа, град/с
Время, с
5,5
5,0
4,5
4,0
3,5
3,0
2,5
2,0
1,5
1,0
0,5
0
2000 4000 6000 8000 10 000 12 000 14 000
Время, с
Оценка угла Ф, град
Без компенсации
С компенсацией