














 2 / 12
2 / 12

А.Ю. Егорушкин, В.И. Мкртчян
2
Инженерный журнал: наука и инновации
# 8·2017
крейсерский полет. В процессе испытаний БИНС подключали к пор-
тативному персональному компьютеру, на который записывались
показания чувствительных элементов и встроенного приемника GPS.
В режиме послемаршрутной обработки проводилось моделирование
работы БИНС с использованием сохраненных данных. Как источник
эталонной скорости использовался приемник GPS. Оценку ошибок
углов ориентации проводили с помощью фильтра Калмана. Специ-
фикация системы «КомпаНав-5.1» приведена ниже:
Масса, кг ………………………………………………………..
2
Габариты, мм …………………………………………………... 120 × 110 × 110
Напряжение питания, В ………………………………………..
10…30
Дрейф датчиков угловой скорости (1
), град/ч ………………
5…7
Смещение нуля акселерометров (1
), м/с
2
…………………...
0,01…0,03
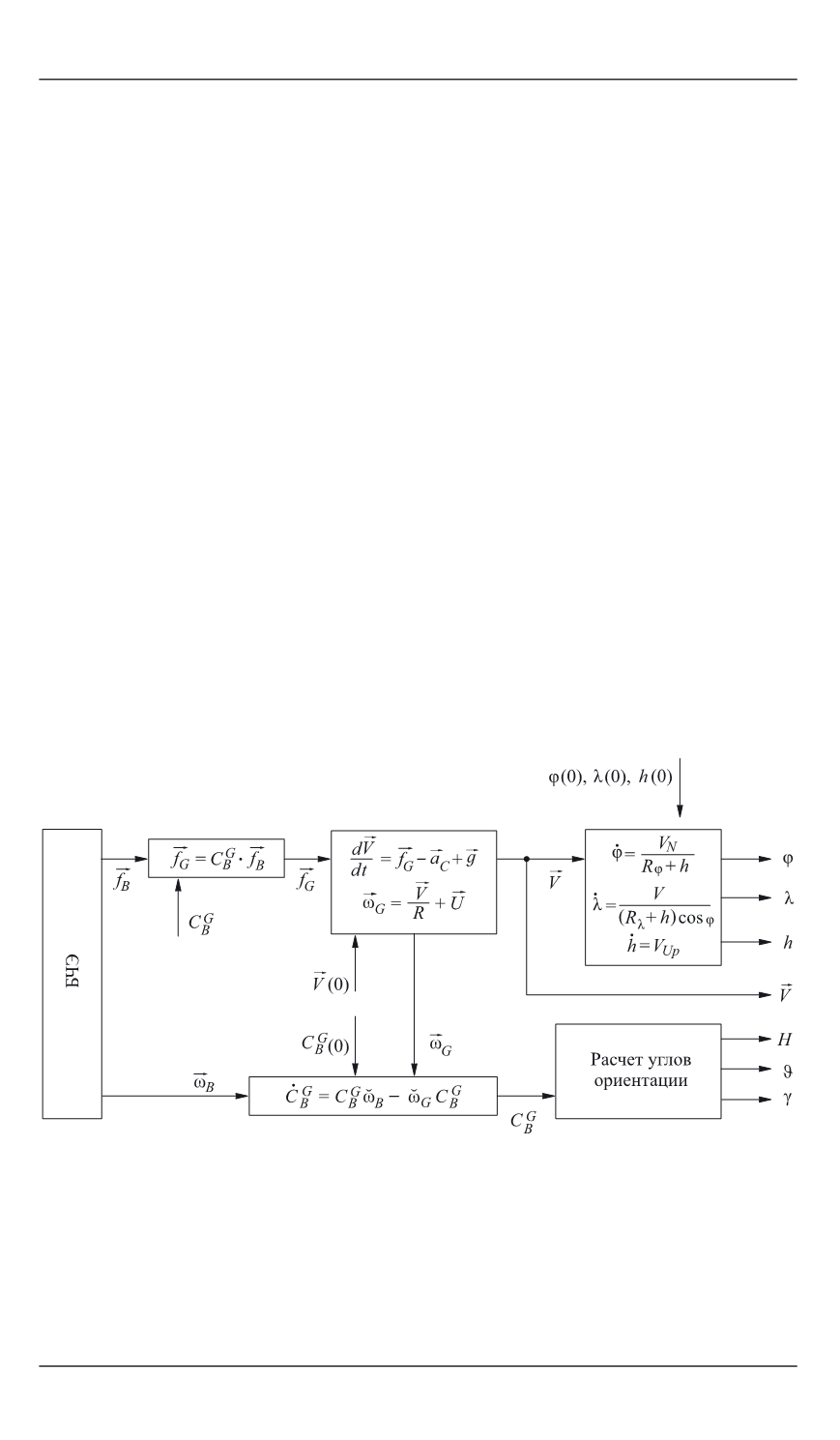
Классический алгоритм бесплатформенной инерциальной
навигационной системы.
Самая распространенная аппаратная реа-
лизация БИНС подразумевает триаду акселерометров и триаду дат-
чиков угловой скорости в качестве чувствительных элементов. Каж-
дый чувствительный элемент жестко закреплен в корпусе так, что его
ось чувствительности направлена по одной из строительных осей
объекта (продольной, нормальной, боковой). Структурная схема
классического алгоритма БИНС представлена на рис. 1.
Рис. 1.
Структурная схема классического алгоритма бесплатформенной
инерциальной навигационной системы:
БЧЭ — блок чувствительных элементов (триада датчиков угловой скорости и триада акселе-
рометров);
B
f
— вектор кажущегося ускорения объекта, составленный из показаний акселе-
рометров;
G
f
— вектор кажущегося ускорения объекта, составленный из проекций вектора
B
f
на
î
си географического трехгранника;
G
B
C
— матрица направляющих косинусов, зада-
E