














 7 / 14
7 / 14

Анализ точности работ, производимых рабочим механизмом одноковшового экскаватора
Инженерный журнал: наука и инновации
# 8·2017 7
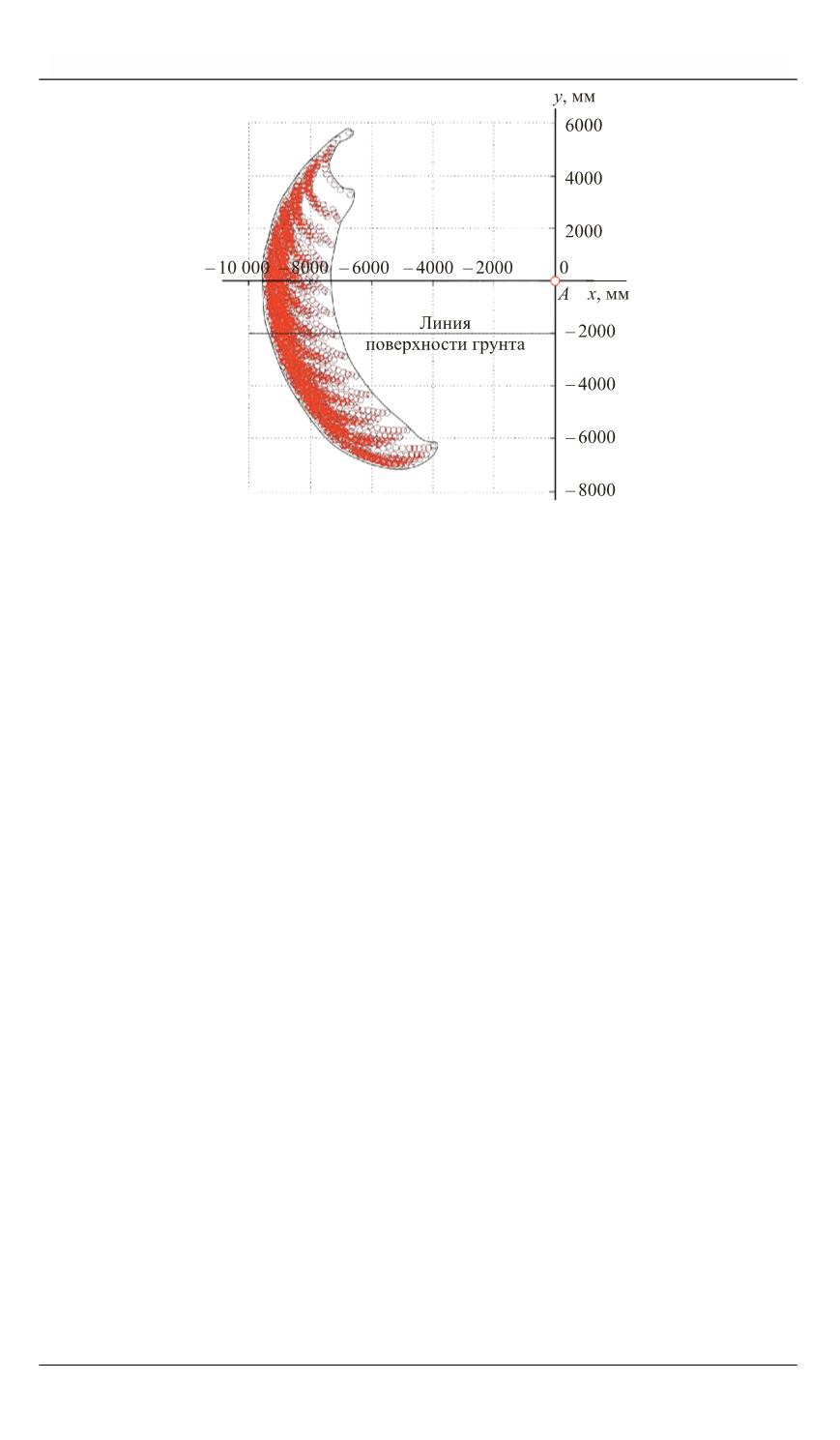
Рис. 5.
Зависимость зоны обслуживания рабо-
чего механизма экскаватора от изменения вход-
ных обобщенных координат
s
1
,
s
2
,
s
3
Совокупная зона обслуживания, подобно рабочей области, пред-
ставляет собой множество положений точки
Q
режущей кромки ков-
ша
3
(см. рис. 2) при последовательном изменении положения участка
кинематической цепи: гидроцилиндра
4
(обобщенная координата
s
1
),
гидроцилиндра
5
и гидроцилиндра
6
.
Оценка геометрических погрешностей перемещения рабочего
механизма экскаватора.
Все звенья кинематической цепи, включая
гидроцилиндры, имеют допуск на изготовление, однако возможны по-
грешности при сборке рабочего механизма. Также каждый конкрет-
ный гидроцилиндр имеет линейную погрешность перемещения в зави-
симости от длины штока [15]. В связи с погрешностью изготовления
стрелы, рукояти, ковша, гидроцилиндров, сборки рабочего механизма
и гидроцилиндра с поворотной платформой, а также с другими про-
блемами, связанными с точностью управления, точность копания мо-
жет существенно отличаться от регламентируемых СНиП.
Для кинематической цепи рабочего механизма экскаватора про-
водится параметрический анализ с составлением размерной цепи.
А в случае его рабочего механизма невозможно применение стан-
дартной методики расчета размерных цепей [16], поскольку кинема-
тическая цепь является разомкнутой, т. е. нет замыкающего звена.
Эту проблему можно разрешить, заменив геометрический расчет
размерной цепи повторным расчетом кинематической цепи с учетом
возможных погрешностей изготовления и хода элементов рабочего
механизма экскаватора для определения местоположения режущей
кромки ковша. При этом сравниваются идеализированные геометри-