














 8 / 14
8 / 14

Е.О. Подчасов, А.Д. Терентьева
8
Инженерный журнал: наука и инновации
# 8·2017
ческие расчеты (размеры приняты номинальными, погрешности от-
сутствуют) и кинематическая цепь с максимально возможными ли-
нейными погрешностями перемещения.
Геометрический расчет размерной цепи рабочего механизма экс-
каватора с учетом погрешностей изготовления элементов рабочего
механизма проводится, как и в предыдущем случае, путем имитаци-
онного моделирования в среде MATLAB. Изменение положения зве-
ньев задается функциями положения. Оценка погрешностей переме-
щения рабочего механизма выполняется по схеме расчета кинемати-
ческой цепи (см. рис. 2) от входного звена (стрела
1
) к выходному
звену (ковш
3
).
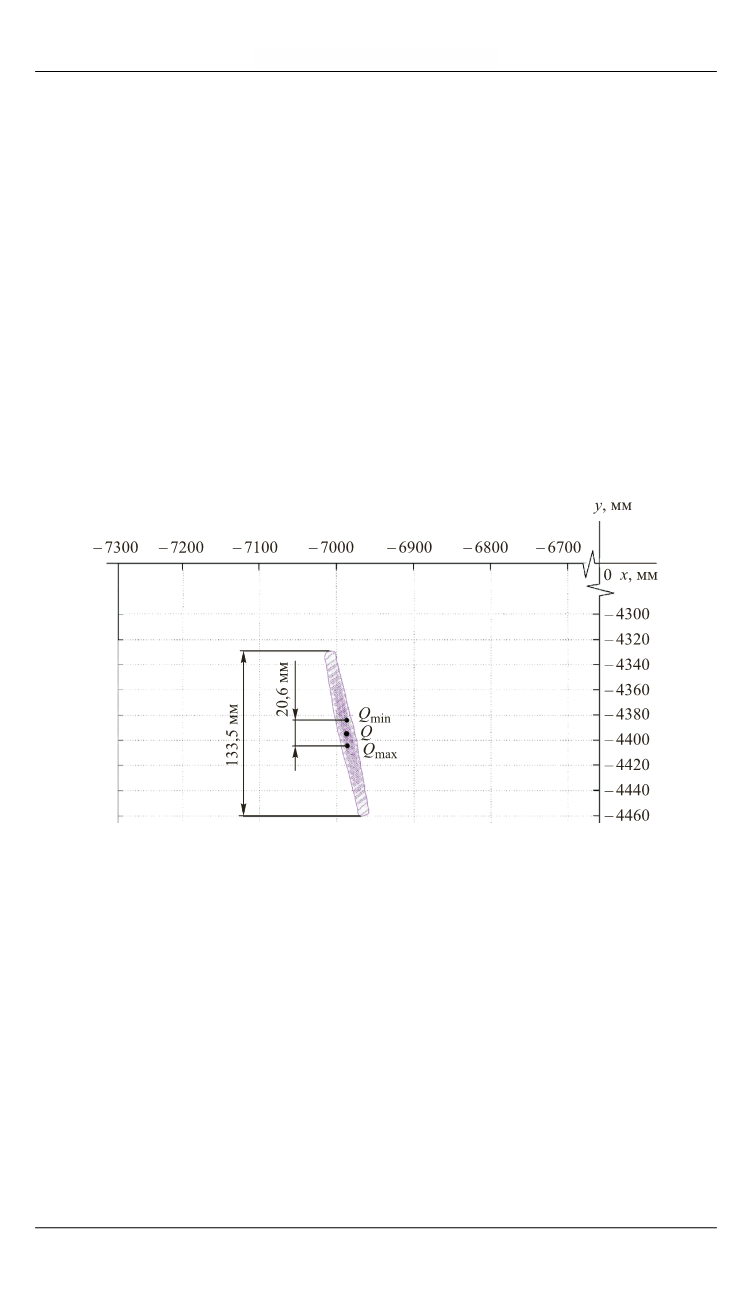
На основании результатов проведенных расчетов построена об-
ласть возможных положений режущей кромки ковша
3
(точки
Q
) в
момент врезания в грунт на дне траншеи глубиной 2,4 м с учетом по-
грешностей изготовления звеньев цепи (рис. 6).
Рис. 6.
Область возможных положений режущей кромки ковша
при
s
1
= 0 мм;
s
2
= 300 мм;
s
3
= 200 мм
В построенной области возможных положений указана точка
Q
—
положение режущей кромки ковша
3
экскаватора в момент врезания
в грунт на дне траншеи при идеальном выполнении всех звеньев ки-
нематической цепи без погрешностей. Также в построенной области
отмечены точки
Q
max
и
Q
min
— положения режущей кромки ковша
при анализе точности возможных отклонений методом максимума-
минимума, где точка
Q
max
получена при предельном максимальном
отклонении всех звеньев кинематической цепи рабочего механизма,
а точка
Q
min
— при предельном минимальном отклонении.
В случае анализа точности методом максимума-минимума об-
ласть возможных положений составляет 4,7 мм вдоль оси абсцисс