














 3 / 14
3 / 14

Анализ точности работ, производимых рабочим механизмом одноковшового экскаватора
Инженерный журнал: наука и инновации
# 8·2017 3
Рис. 1.
Гусеничный экскаватор ЧЕТРА ЭГП-230
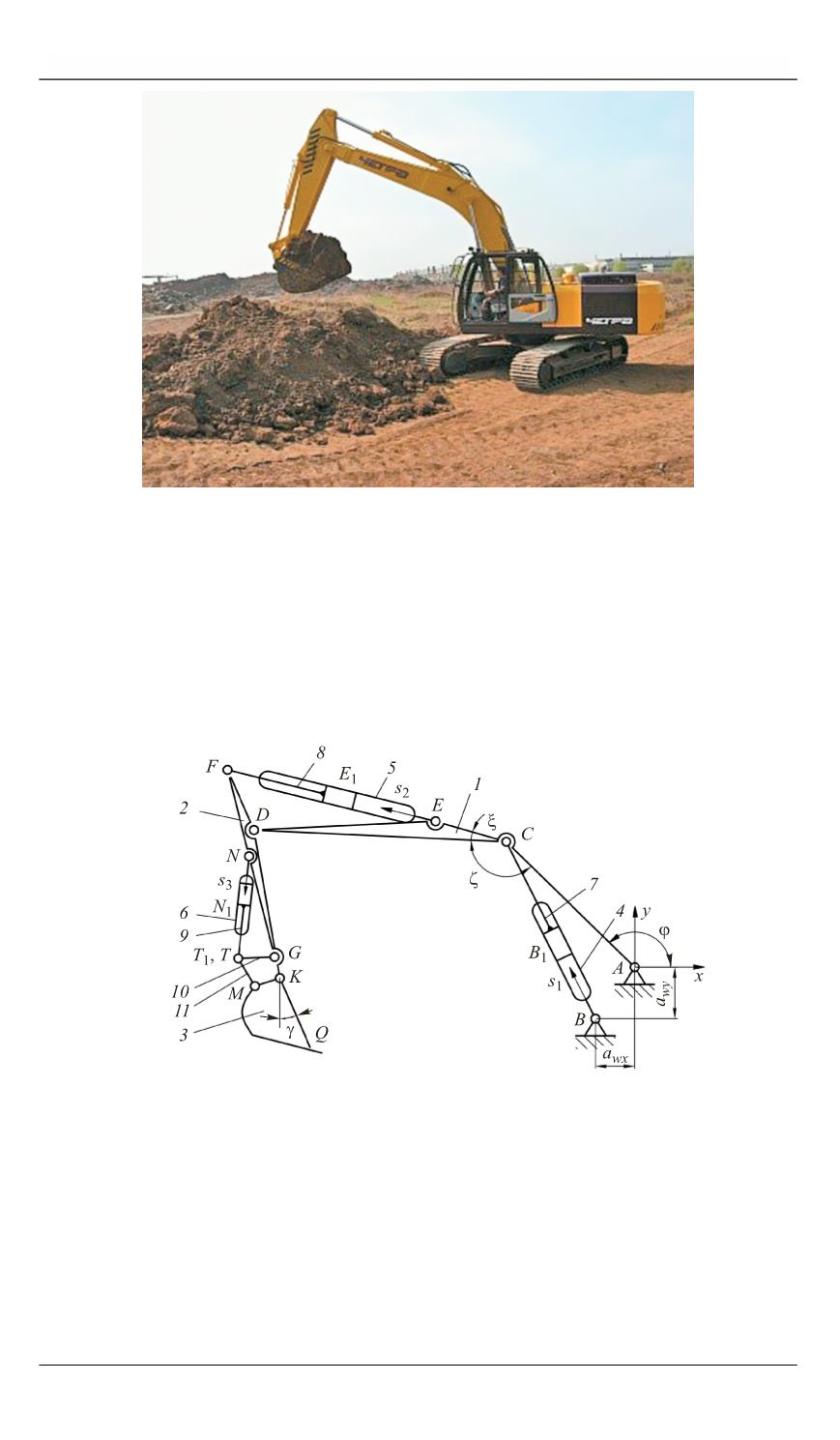
Плоская модель рабочего механизма одноковшового экскаватора,
построенная на основе структурно-кинематических связей, позволяет
исследовать характерные конструктивные особенности рабочего ме-
ханизма с числом подвижностей
W
= 3 [11, 12] (рис. 2).
Рис. 2.
Кинематическая схема рабочего механизма:
1
— стрела;
2
— рукоять;
3
— ковш;
4
,
5
,
6
— гидроцилиндры;
7
,
8
,
9
— штоки гидроцилиндров;
10
— коромысло;
11
— тяга
Для плоской модели рабочего механизма экскаватора обобщен-
ными координатами входного воздействия являются
s
1
,
s
2
,
s
3
, а обоб-
щенными координатами выходного —
x
,
y
,
.
Кинематику разомкнутой цепи рабочего механизма экскаватора
следует описывать по методу проекций векторных контуров. В непо-