














 9 / 14
9 / 14

Анализ точности работ, производимых рабочим механизмом одноковшового экскаватора
Инженерный журнал: наука и инновации
# 8·2017 9
и 20,6 мм вдоль оси ординат при регламентируемой СНиП, равной
0,05 м. Дополнительно в область возможных положений точки
Q
ре-
жущей кромки ковша
3
введен расчет возможных положений точки
Q
(при изготовлении всех звеньев кинематической цепи без погрешно-
стей, появление которых в процессе работы готового экскаватора не-
возможно), но с учетом геометрических погрешностей при перемеще-
нии штока гидроцилиндра. В этом случае область возможных положе-
ний существенно расширится и составит 57,1 мм вдоль оси абсцисс и
133,5 мм вдоль оси ординат, что в несколько раз превышает регламен-
тируемое СНиП значение 0,05 м.
В случае тригонометрически нелинейной разомкнутой кинемати-
ческой цепи классический метод максимума-минимума не дал бы
оценки такого сочетания погрешностей изготовления звеньев цепи,
при котором погрешность выходного звена ковша
3
рабочего меха-
низма была бы максимальной, что важно для оценки требований точ-
ности выполнения элементов рабочего механизма. Данная погреш-
ность, являющаяся систематической, определяется для каждого кон-
кретного экскаватора в ходе приемосдаточных испытаний. Она
подлежит обязательной корректировке системой управления рабочим
механизмом экскаватора, однако следует представлять ее возможные
значения.
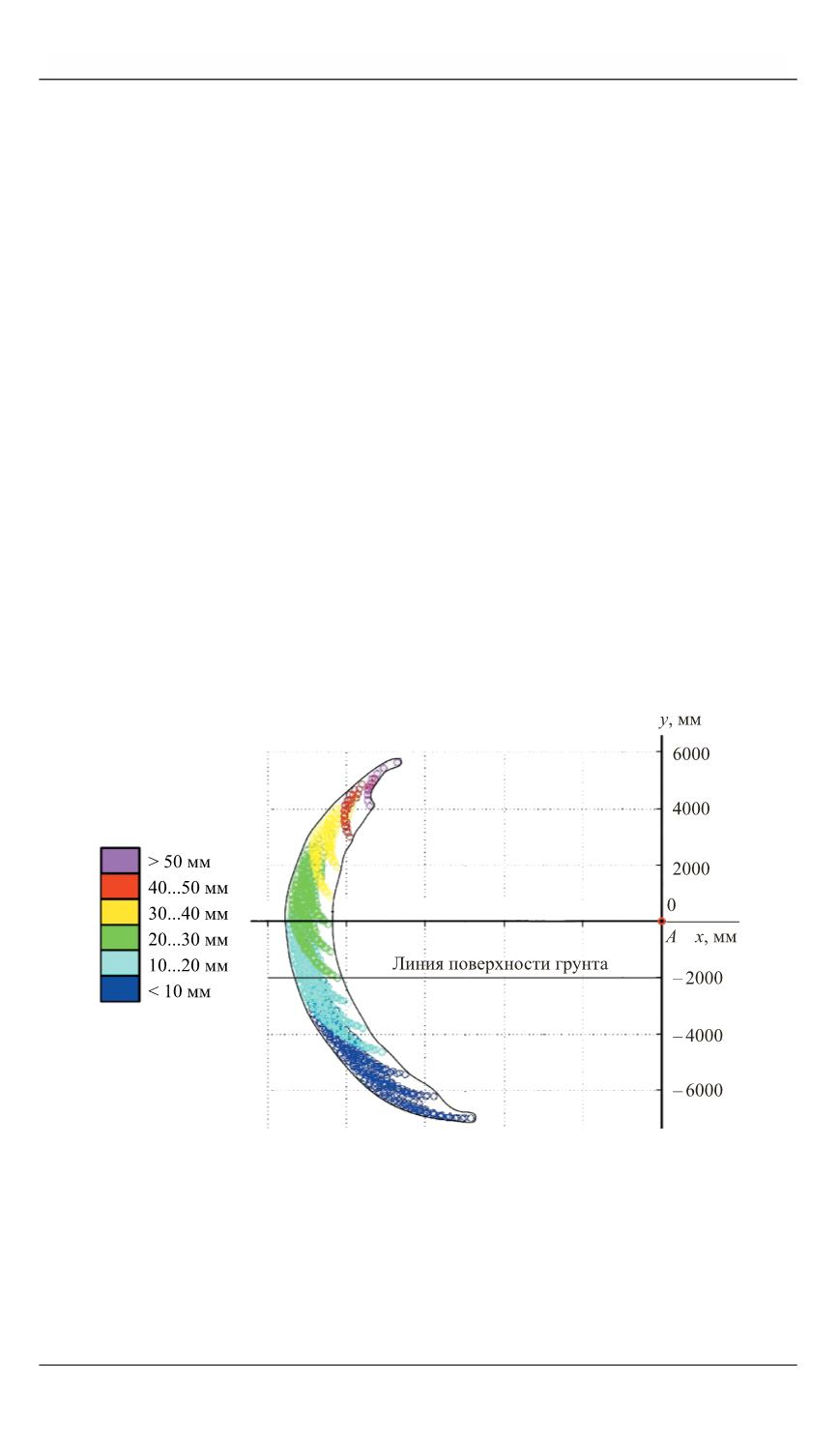
Рис. 7.
Распределение возможных погрешностей положения точки
Q
в зоне обслуживания
Оценка погрешностей перемещения рабочего механизма экс-
каватора с учетом погрешностей перемещения штоков гидроци-
линдров.
Штоки гидроцилиндров имеют допуски на величину хода
штока в зависимости от основных размеров. С учетом погрешностей