














 13 / 15
13 / 15

Оптимальный вертикальный подъем электрического мультикоптера
Инженерный журнал: наука и инновации
# 11·2016 13
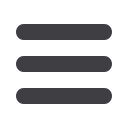
Рис. 4.
КПД винтомоторной группы
:
Мотор-1, ВМГ-1:
k
T
= 1,7;
R
y
= 0,028;
Мотор-2, ВМГ-2:
k
T
= 1,7;
R
y
= 0,055;
Мотор-3, ВМГ-3:
k
T
= 2,5;
R
y
= 0,028
торых не учитывается КПД мотора, будет незначительна. Разумеется,
само значение КПД винтомоторной группы с учетом КПД мотора
будет ниже КПД пропеллера. Если, например, КПД винтомоторной
группы составляет 50 %, то удельный расход энергии будет равен 2
G
Дж/м (или ньютонов).
КПД мотора при висении.
Формулу (32) можно использовать
для оценки КПД мотора при зависании мультикоптера у поверхности
земли. Такой режим является одним из основных для летательного
аппарата рассматриваемого класса. Подставив в выражение (32) зна-
чение λ = 0, получаем
(
)
100
вис
100
.
1 1
T
М
T
k
k
η
η =
η
− +
(34)
Формула (34) дает оценку сверху КПД мотора при висении, она
применима для значений коэффициента запаса тяги
k
T
от 1 до при-
мерно 2,5, что соответствует значениям тяговооруженности реальных
летательных аппаратов.
Заключение.
Скорость вертикального подъема, обеспечивающая
минимальный расход энергии аккумуляторной батареи для подъема
на заданную высоту, обратно пропорциональна квадратному корню
из нагрузки на ометаемую площадь и увеличивается с усилением ло-
бового сопротивления. Зависимостью от плотности воздуха на высо-
тах, не превышающих 1000 м, можно пренебречь. Необходимая для
достижения заданной оптимальной скорости тяговооруженность за-
висит от аэродинамических характеристик пропеллеров, жесткости
механической характеристики двигателя и коэффициента лобового