














 7 / 14
7 / 14

Система многоуровневой импульсной коррекции
Инженерный журнал: наука и инновации
# 3·2016 7
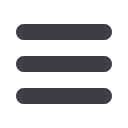
Рис. 4.
Зависимость координаты
z
от време-
ни на конечном участке траектории:
красная линия — 2500 Н; синяя линия — 5000 Н
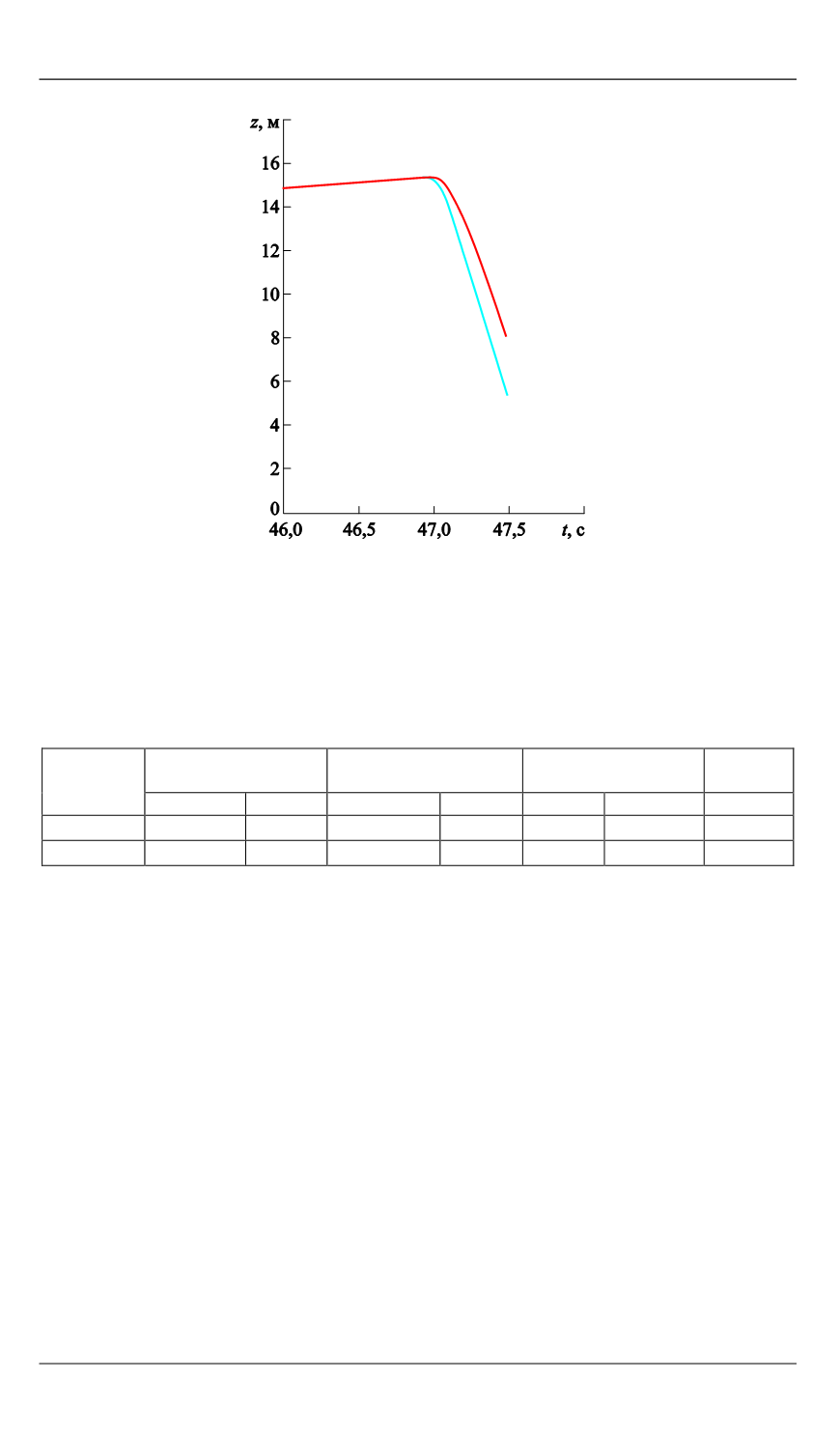
Таблица 1
Значения составляющих промаха по цели
для двигателей большой и малой тяги
Значение
тяги, Н
Положение цели, м
Координаты точки
падения КБ, м
Отклонения точки
падения от цели, м
Промах,
м
x
ц
z
ц
x
z
Δ
x
Δ
z
h
5000
7205,000 8,000
7206,520
5,515
1,520
–2,485
2,913
2500
7205,000 8,000
7202,950
8,141 –2,050
0,141
2,055
Анализ приведенных на графиках (см. рис. 3, 4) и в табл. 1 дан-
ных свидетельствует о существенном «перелете» по боку в случае
коррекции с помощью двигателей большой тяги. При использовании
двигателей малой тяги получаем точное попадание по оси
Oz
и
«недолет» по оси
Оx
.
Ввиду вращения снаряда вокруг продольной оси провести кор-
рекцию только в одной плоскости невозможно, так как направление
импульса постоянно меняется во времени [9, 10]. Согласно данным
на графиках (рис. 5, 6), в случае использования двигателей малой тя-
ги почти все коррекции направлены на уменьшение рассогласования
с целью расположенной по боку. В результате возникают ошибки по
дальности. В другом же случае большое значение импульса оказыва-
ет существенное влияние на коррекцию сразу в двух плоскостях. Также
следует отметить, что после предпоследнего импульса (5000 Н) наблю-
дается большая боковая скорость снаряда и на момент последней
коррекции — «перелет» в боковой плоскости. Последний импульс