














 5 / 14
5 / 14

Система многоуровневой импульсной коррекции
Инженерный журнал: наука и инновации
# 3·2016 5
β arcsin ,
z
V
V
=
где
α
— угол атаки;
β
— угол скольжения;
определение угла наклона траектории и путевого угла:
θ arcsin
,
yg
V
V
=
Ψ arctg
,
gz
gx
V
V
=
−
где
θ
— угол наклона траектории;
Ψ
— путевой угол.
Бортовой координатор цели (БКЦ) жестко связан с корпусом КБ.
Чувствительный элемент БКЦ отслеживает отраженный от цели сигнал
(принимаемый в виде «пятна»), подсвечиваемый внешним источником.
Границы видимости БКЦ определяют максимальным и минимальным
углом пеленга. «Пятно» на одном из секторов чувствительного элемен-
та БКЦ будет указывать направление коррекции [6].
На основе приведенной модели с использованием языка Fortran
разработан вычислительный комплекс. Для численного интегрирова-
ния дифференциальных уравнений был выбран метод Рунге — Кутты
4-го порядка [7].
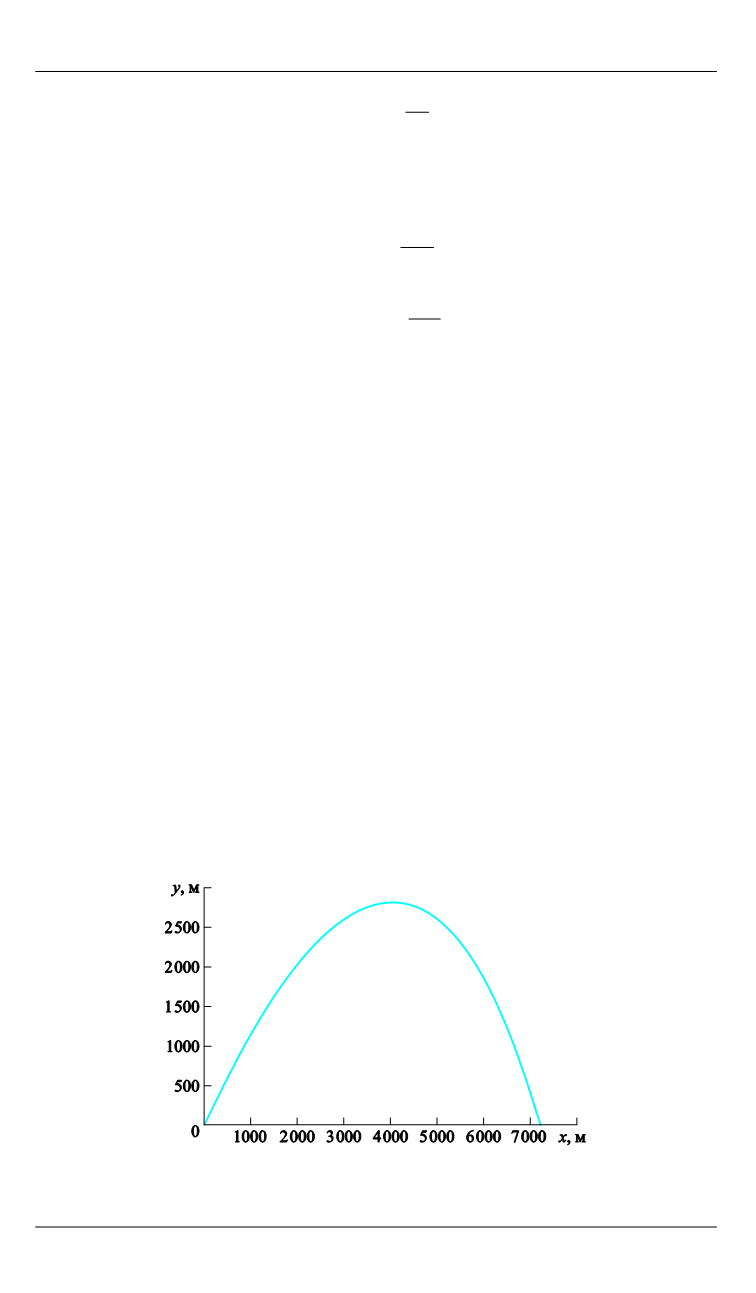
Номинальную траекторию движения рассчитываем без осуществ-
ления сброса головного обтекателя и проводим коррекцию (рис. 1 и 2).
Данная траектория определяет номинальную точку падения снаряда,
относительно которой изменится положение цели [8]. Для поражения
цели будет использована коррекция. Качество поражения характеризу-
ется попаданием снаряда в квадрат 5×5 м, центром которого является
фактическое положение цели.
Рис. 1.
Номинальная траектория КБ в плоскости
хОy