А.А. Гурченков, Л.А. Муравей, А.М. Романенков
12
точка
0
0,56,
x
время процесса
20, 25,
T
а при
3
граничная
точка
0
0, 66 ,
x
а время процесса
15, 25.
T
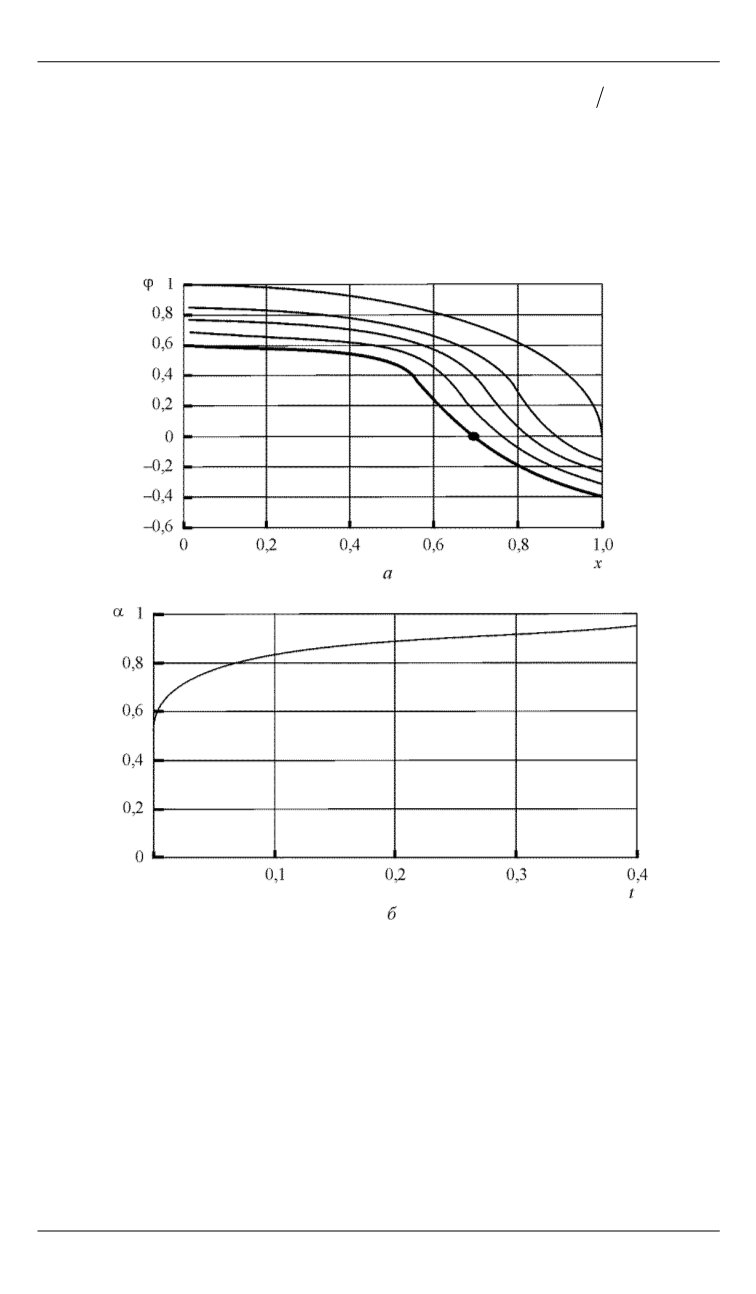
Данные расчета ИЛТ с применением оптимального управления
для угла падения ионов
и
5
показаны на рис. 5. Глубина трав-
ления
0, 4.
H
На рис. 5,
а
граничная точка
0
0, 685,
x
время про-
цесса
14, 23.
T
Рис. 5.
Эволюция профиля маски при оптимальном режиме (
а
) и график
оптимального управления процессом ИЛТ (
б
)
В работе найдены оптимальные режимы процесса ИЛТ, которые
позволяют минимизировать уход геометрических размеров вытрав-
ливаемых элементов с помощью изменения угла падения ионного
луча относительно мишени. Полученные результаты имеют прямое
отношение к задачам управления движением вращающихся твердых
тел с жидкостью [9–16]. Стоит также подчеркнуть, что формулиро-
вать принцип максимума для задач со смешанными ограничениями в
форме Понтрягина нельзя. В его формулировку входят меры, имею-


