А.Г. Лесков, К.В. Бажинова, С.Д. Морошкин, Е.В. Феоктистова
8
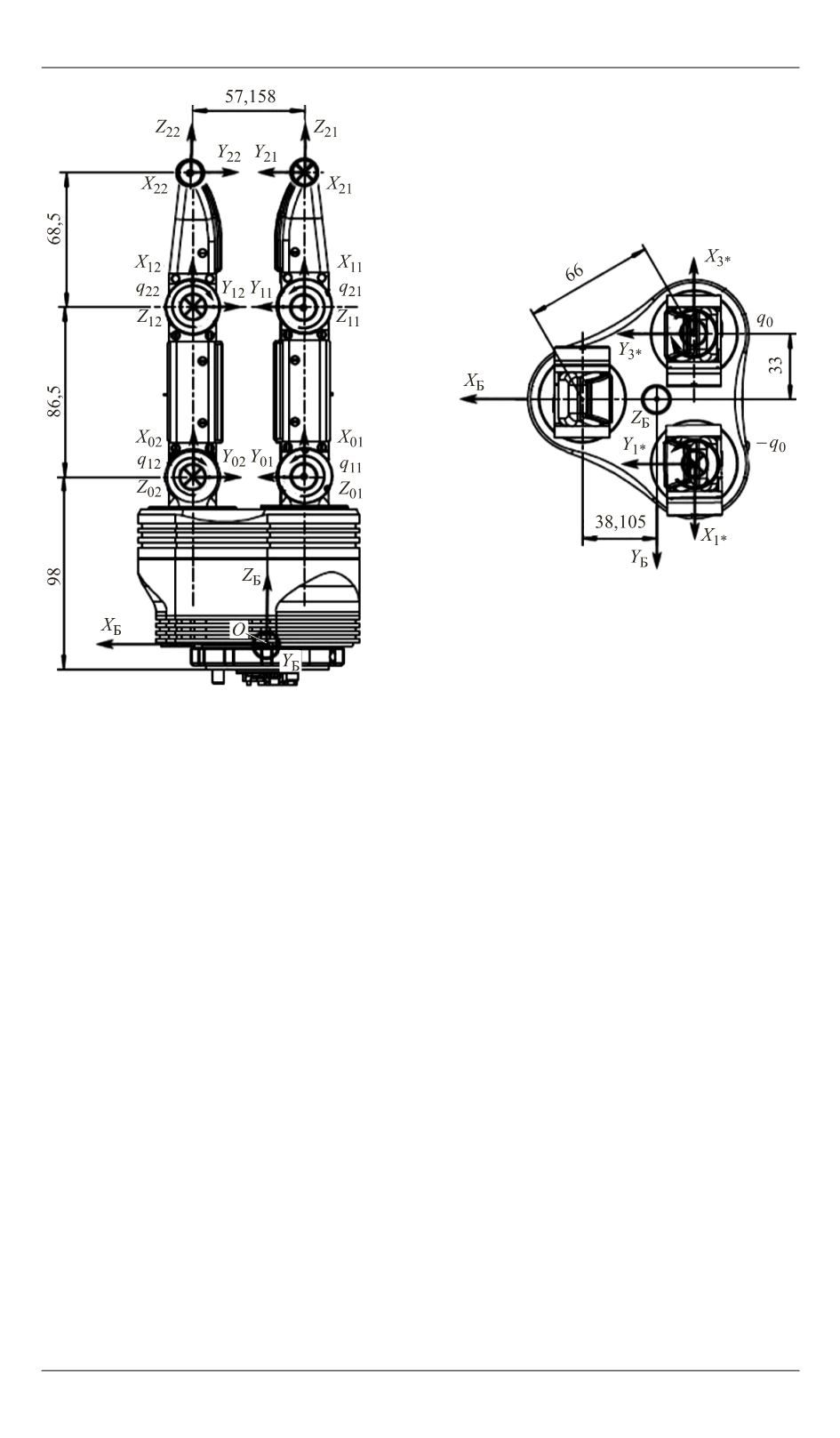
ет с положительным направлением поворота, а ее центр совпадает с
геометрическим центром «сустава». С концом каждого пальца связана
СК, ось
OZ
2
j
которой направлена вдоль последней фаланги.
Координаты промышленного робота обозначим
q
1
,
q
2
,
q
3
. Угло-
вые координаты сочленений кисти обозначим двойными индексами:
q
11
,
q
21
для первого пальца (см. рис. 1, звенья
4
и
7
),
q
12
,
q
22
— для
второго пальца (звенья
5
и
9
) и
q
13
,
q
23
— для третьего (звенья
6
и
9
).
Углы поворота звеньев
4
и
5
вокруг осей
OZ
j
* на рис. 2 (направлены
от плоскости рисунка) обозначены координатами ±
q
0
. Значения этих
углов принимаются постоянными.
Решение прямой задачи кинематики для рассматриваемого при-
мера находим из уравнения (2). При вычислениях учитывается, что
СК точки крепления оснований звеньев
4
,
5
и
6
смещены относи-
тельно СК звена
3
путем видоизменения формул расчета векторов
l
4
,
l
5
и
l
6
:
l
4
=
τ
13.Б
l
03.Б
+
l
13.03
;
l
5
=
τ
11.Б
l
01.Б
+
l
11.01
;
l
6
=
τ
12.Б
l
02.Б
+
l
12.02
,
Рис. 2.
СК трехпалой кисти


