А.В. Горевой, В.Я. Колючкин
20
ных координат отдельной точки в приближении малых шумов, под-
тверждены результатами численного моделирования для узкополь-
ной комплексированной СРТО, содержащей одно устройство проек-
ции и два устройства регистрации.
Разработана методика анализа погрешности регистрации трех-
мерных образов в пределах рабочего объема при известных парамет-
рах устройств и алгоритмов. Предложена методика верификации
полученных результатов с использованием статистического модели-
рования и определены границы применимости рассмотренного мате-
матического описания при возрастании погрешности определения
координат соответствующих точек. Полученные результаты позво-
ляют объединить подходы, используемые при моделировании систем
проекции и регистрации, разработке алгоритмов триангуляции и
оценке эффективности различных алгоритмов определения соответ-
ствий.
ЛИТЕРАТУРА
[1] Hartley R.I., Zisserman A.
Multiple view geometry
. Cambridge, UK: Cambridge
University Press, 2000.
[2] Forsyth D.A., Ponce J.
Computer vision: a modern approach
. Upper Saddle
River, NJ, USA: Prentice-Hall, Inc., 2003.
[3] Kannala J., Heikkilä J., Brandt S.S. Geometric camera calibration.
Wiley
Encyclopedia of Computer Science and Engineering
, 2008.
[4] Ramalingam S.
Generic imaging models: calibration and 3D reconstruction
algorithms: Ph. D. thesis.
Institut National Polytechnique de Grenoble, 2006.
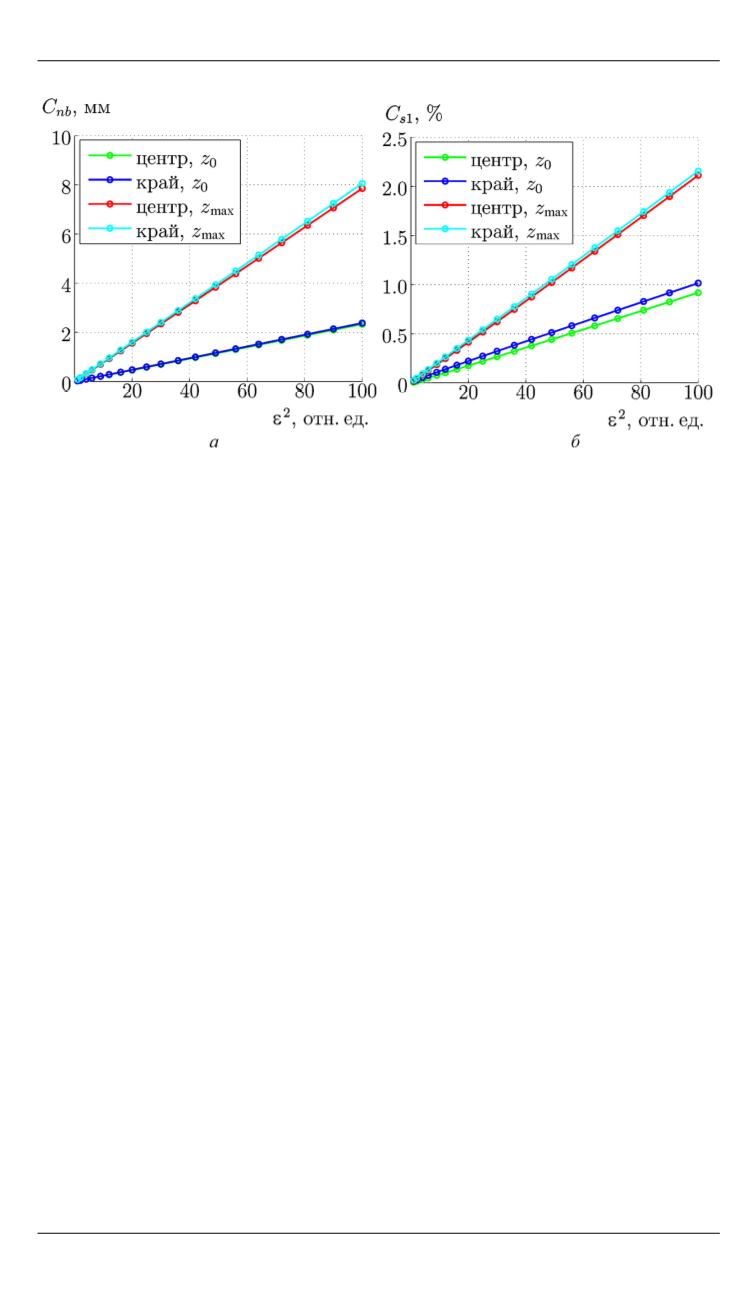
Рис. 5.
Зависимость значений критериев достоверности оценки погрешно-
сти определения координат изображения точки от ее значения:
a
— для смещения;
б
— для матрицы ковариации


