6
Л.А. Каргинов
Таблица 2
Ограничения обобщенных координат
Обобщенная
координата
Значение, град
Новое нулевое
положение, град
минимальное
максимальное
q
7
,
q
11
,
q
15
,
q
19
–20
20
0
q
8
,
q
12
–55
–15
–45
q
9
,
q
13
45
135
75
q
10
,
q
14
–135
–45
–45
q
16
,
q
20
20
60
45
q
17
,
q
21
–90
–45
–75
q
18
,
q
22
0
135
45
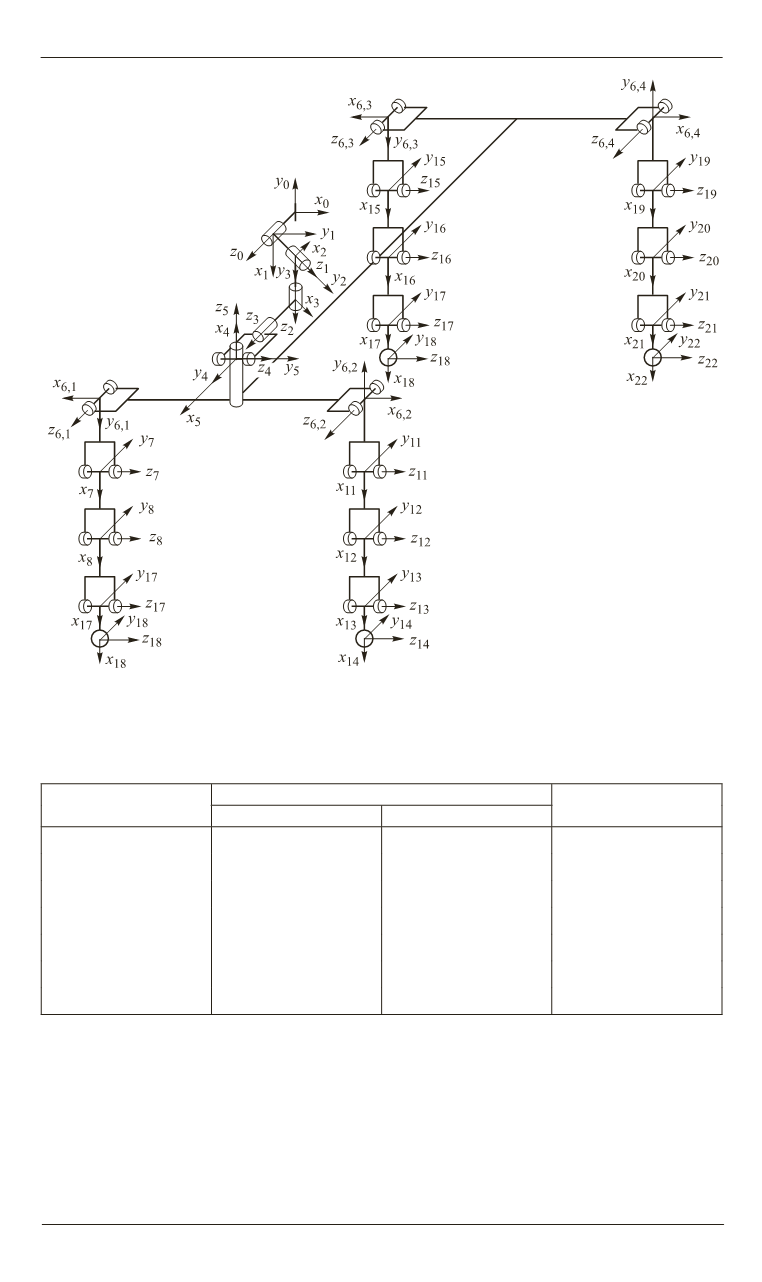
3. Зададим ограничения изменений обобщенных координат (пока-
заны штриховыми линиями на рис. 2). Эти ограничения могут быть
выбраны произвольно из условий удобства или могут отражать кон-
структивные особенности механизма. Ограничения обобщенных коор-
динат для рассматриваемого ЧШР и значения нового нулевого положе-
ния механизма приведены в табл. 2.
Рис. 1.
Кинематическая схема исполнительного механизма ЧШР


