5
Синтез управляющих воздействий для приводов исполнительных механизмов ШР
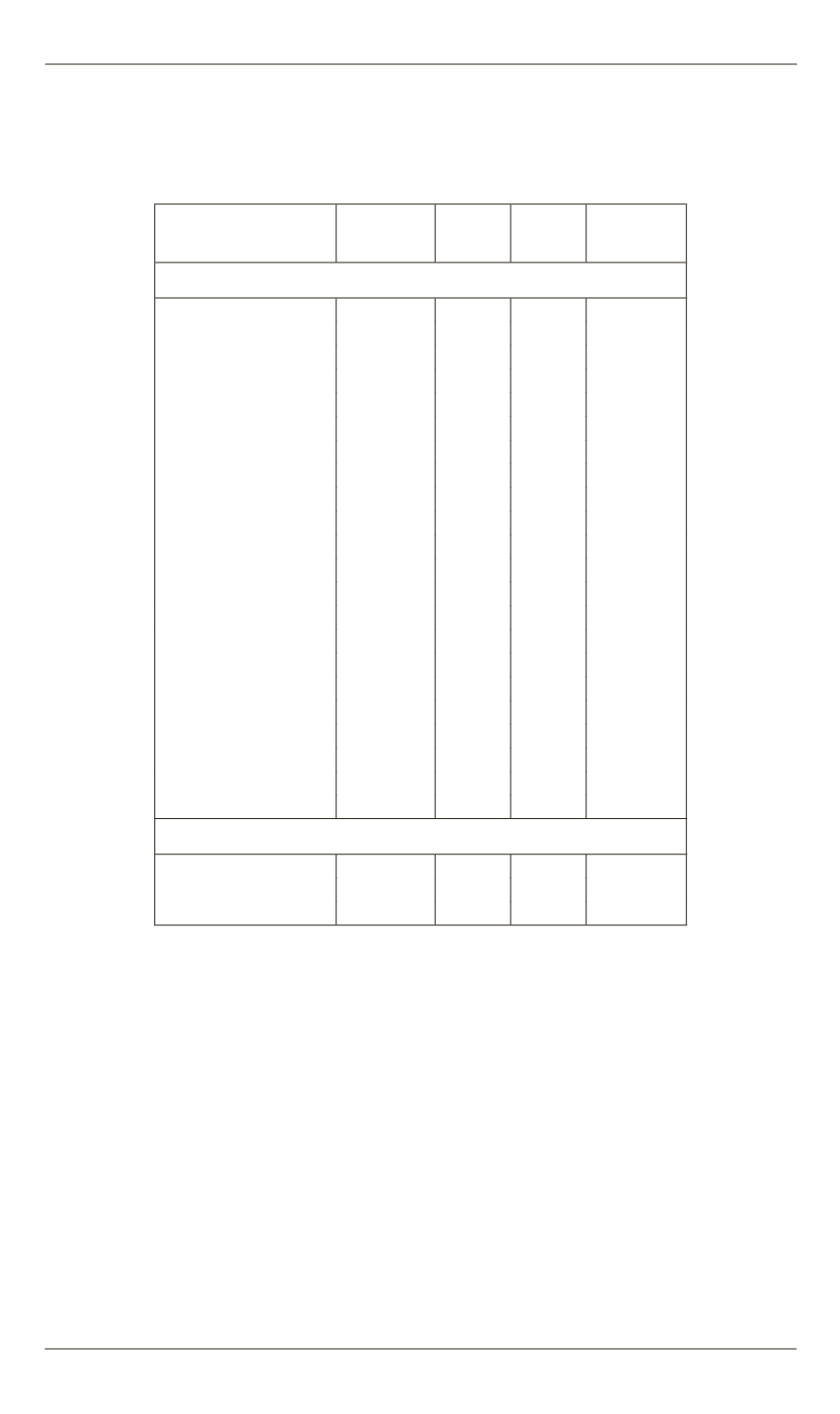
Таблица 1
Значения параметров Денавита — Хартенберга
для основных и вспомогательных систем
координат ЧШР
Номер системы
координат
θ
i
, рад
d
i
, м
a
i
, м α
i
, рад
Для основных систем координат
1
–π/2
0
0
–π/2
2
π/2
0
π/2
3
π/2
0
–π/2
4
π/2
0
π/2
5
π/2
0
π/2
6
–π/2
0,5 –π/2
7
π/2
0
–π/2
8
0
0,3
0
9
0
0,5
0
10
0
0,5
0
11
–π/2
0
–π/2
12
0
0,3
0
13
0
0,5
0
14
0
0,5
0
15
π/2
0
–π/2
16
0
0,3
0
17
0
0,5
0
18
0
0,5
0
19
–π/2
0
–π/2
20
0
0,3
0
21
0
0,5
0
22
0
0,5
0
Для вспомогательных систем координат
6,2
π
0
1
0
6,3
0
–2 0
0
6,4
π
–2 1
0
2. После расстановки систем координат и нумерации звеньев и соч-
ленений необходимо определить начальное положение механизма. Мож-
но использовать то положение, которое представлено на рис. 1, а можно
назначить новое, введя некоторые начальные значения обобщенных ко-
ординат. Зададим новое положение механизма (рис. 2). Значения параме-
тров нового нулевого положения механизма приведены в табл. 2.
Назначение нового начального положения может быть связано с
тем, что нулевое положение механизма на кинематической схеме не
соответствует нулевому положению механизма, предусмотренному кон-
структором, т. е. начальное положение может быть неудобным с пози-
ции алгоритмов управления или не может быть достигнуто ввиду ука-
занных выше конструктивных ограничений.


