12
Л.А. Каргинов
начальное положение перед сменой типа движения предотвращает си-
туации, в которых робот может потерять равновесие.
Поясним последнее утверждение на примере. Пусть передняя пра-
вая нога находится в фазе переноса. Если при этом происходит переход
передней левой ноги в фазу переноса, то робот потеряет равновесие.
Пример расчета моментов приводов ЧШР.
При расчете исполь-
зуется программа моделирования древовидных исполнительных меха-
низмов ШР, реализующая уравнение динамики древовидного шагаю-
щего механизма в блочно-матричном виде [1]:
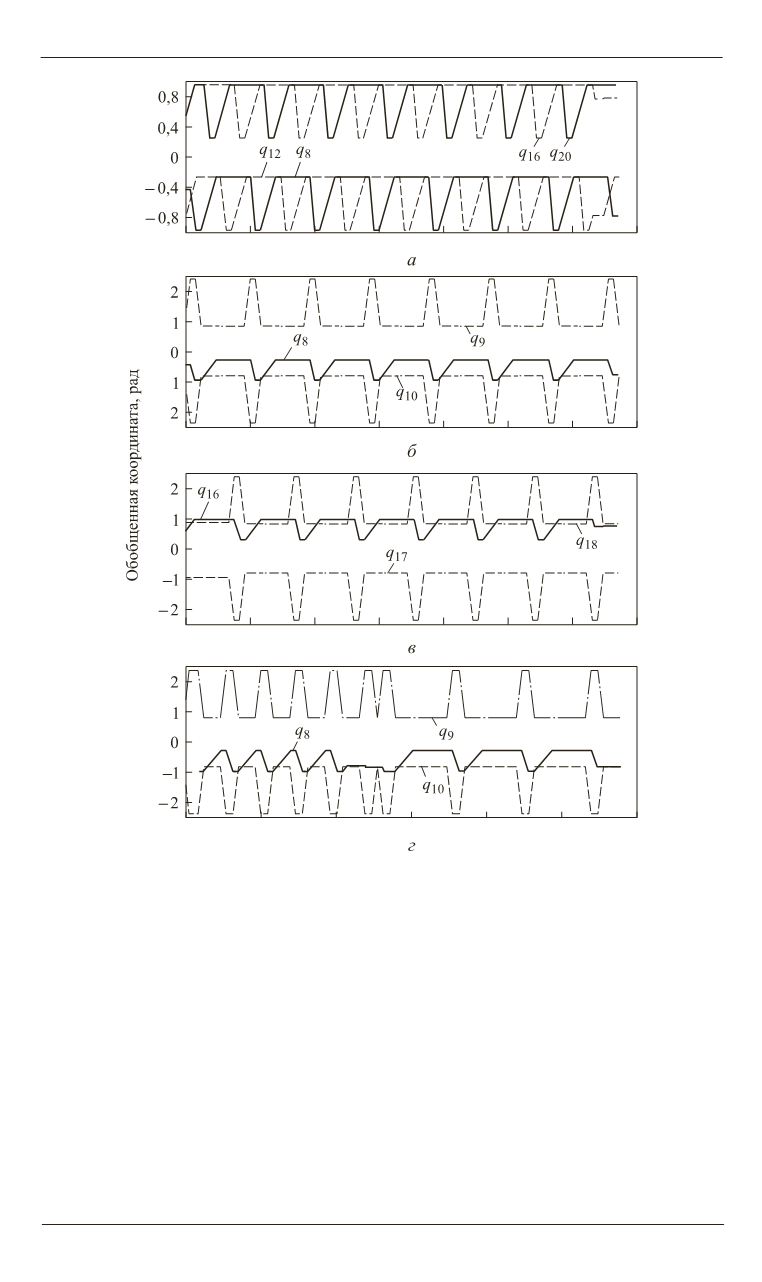
Рис. 5.
Зависимости обобщенных координат от времени для бедренных
сочленений всех ног (
а
), передней правой (
б
) и задней правой ноги (
в
), для
передней правой ноги при смене типа движения (
г
)


