10
Л.А. Каргинов
Пример реализации прямолинейного движения ЧШР
.
Значения
ограничений соответствуют значениям, приведенным в табл. 2. Началь-
ное положение выбрано произвольно из диапазона допустимых значе-
ний (в области, ограниченной штриховыми линиями, см. рис. 2). В дви-
жении принимают участие сочленения
q
8
,
q
9
,
q
10
,
q
12
,
q
13
,
q
14
,
q
16
,
q
17
,
q
18
,
q
20
,
q
21
и
q
22
. Сочленения
q
7
,
q
11
,
q
15
и
q
19
заблокированы. Механизм со-
вершает 18 шагов. Время движения 8,3273 с. Зависимости обобщенных
координат различных сочленений от времени приведены на рис. 4.
Перемещение передних ног при прямолинейном движении проис-
ходит в противофазе (рис. 4,
в
). Когда одна нога является опорной, вто-
рая — переносится, что соответствует рассмотренной выше схеме сме-
ны опорных ног при прямолинейном движении.
В настоящей работе не представлены такие зависимости для соч-
ленений задней правой ноги, поскольку они идентичны зависимостям
для сочленений задней левой ноги в противофазе.
Пример реализации прямолинейного «осторожного» движения
ЧШР
.
Значения ограничений соответствуют значениям, приведенным
в табл. 2. Начальное положение выбрано произвольно из допустимых
значений. В движении принимают участие сочленения
q
8
,
q
9
,
q
10
,
q
12
,
q
13
,
q
14
,
q
16
,
q
17
,
q
18
,
q
20
,
q
21
и
q
22
. Сочленения
q
7
,
q
11
,
q
15
и
q
19
заблокиро-
ваны. Механизм совершает 29 шагов. Время движения 13,4162 с. За-
висимости обобщенных координат от времени представлены на рис. 5.
В течение одного шага переносится только одна нога, что соответ-
ствует приведенной выше схеме смены опорных ног для прямолиней-
ного «осторожного» движения (рис. 5,
а
). Ширина участков кривых
между шагами больше, чем при прямолинейном движении, что обу-
словлено переносом ног по одной (см. рис. 5,
б
,
в
).
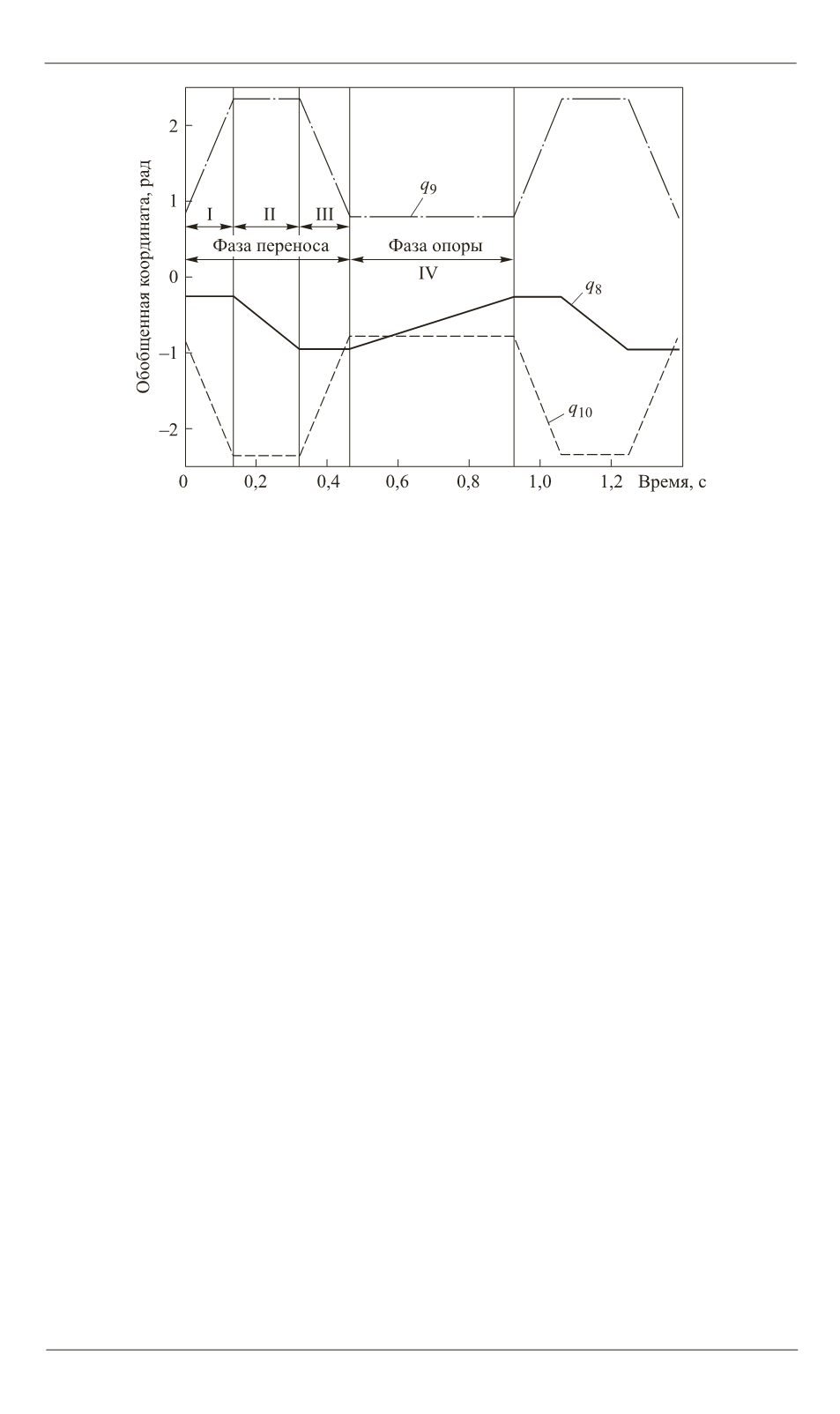
Рис. 3.
Фазы опоры и переноса для передней правой ноги


