11
Синтез управляющих воздействий для приводов исполнительных механизмов ШР
Пример смены типа движения. На рис. 5,
г
приведены зависимости
обобщенных координат от времени для передней правой ноги при из-
менении движения с прямолинейного на прямолинейное «осторожное».
В момент смены типа движения механизм возвращается в выбранное
ранее начальное положение. При этом все ноги робота должны нахо-
диться на опорной поверхности (см. рис. 2). Возвращение механизма в
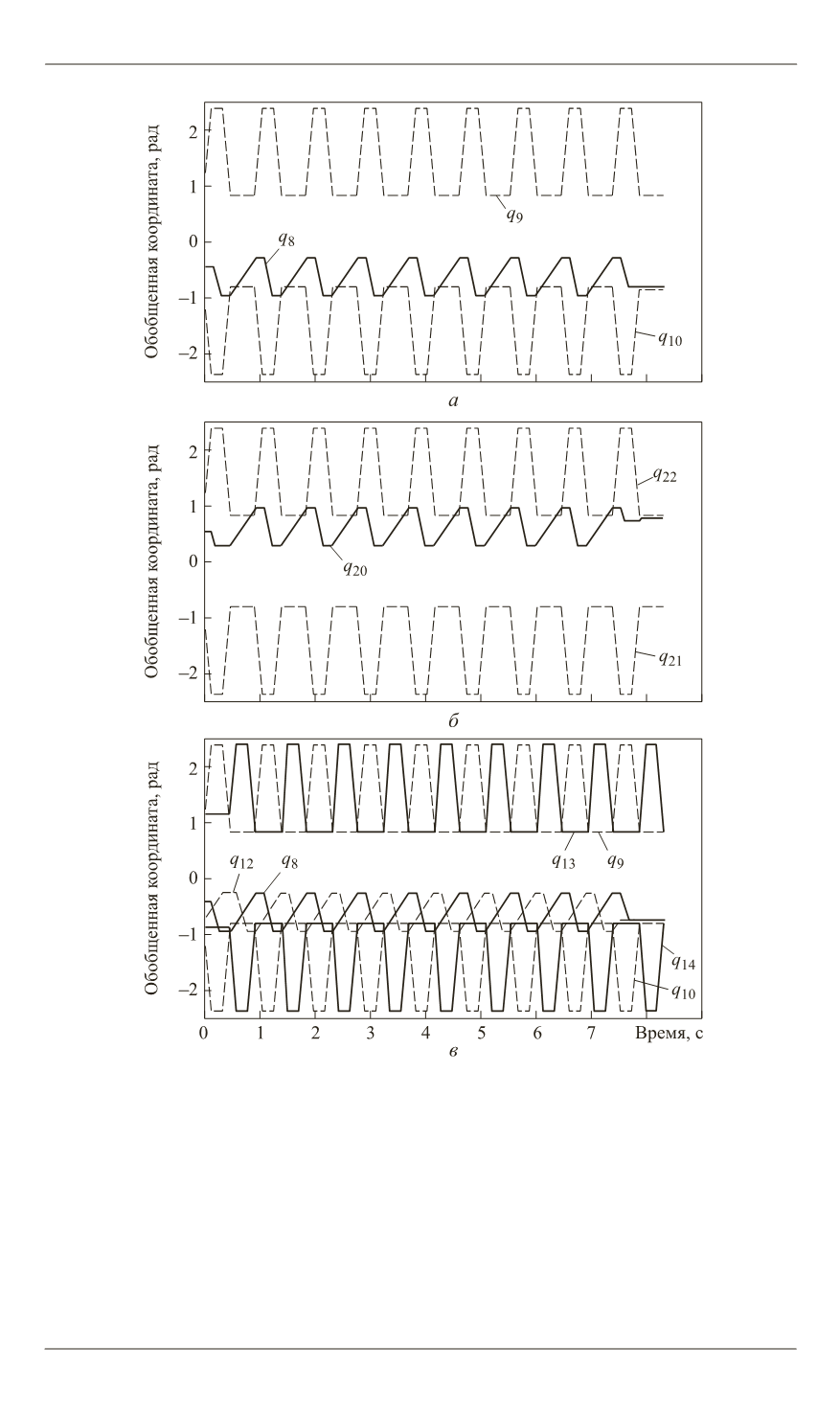
Рис. 4.
Зависимости обобщенных координат бедренных сочленений всех
ног (
а
), передних правой (
б
) и левой ног (
в
)


