14
Л.А. Каргинов
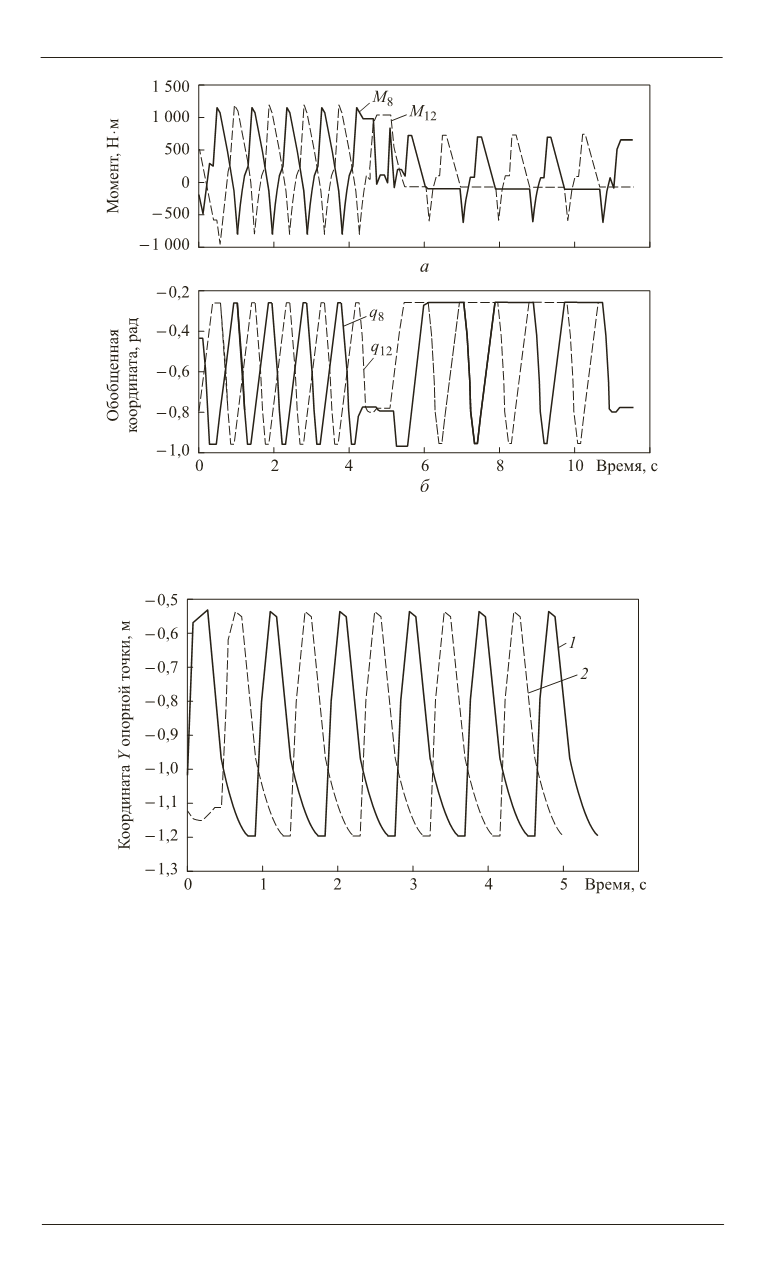
Согласно зависимости, приведенной на рис. 7, в процессе прямо-
линейного движения координаты опорных точек передних ног никогда
не достигают минимального значения одновременно, следовательно,
имеется запас по высоте.
Выводы.
В статье рассмотрен подход к формированию управляю-
щих воздействий, не требующий решения обратной задачи кинематики.
Преимущества этого подхода:
•
решение однозначно (за счет выбора элементов шага и порядка их
следования) и определяется относительно реальных ограничений ме-
Рис. 6.
Зависимости моментов
М
8
и
М
12
приводов (
а
) и обобщенной
координаты (
б
) от времени для сочленений
q
8
и
q
12
Рис. 7.
Зависимость координат опорных точек передних правой (
1
) и левой (
2
)
ног в системе координат рабочего пространства от времени


