
















 7 / 14
7 / 14

Метод и алгоритм расчета координат точек прицеливания
…
Инженерный журнал: наука и инновации
# 12·2017 7
емое на основании результатов статистической оценки возможной
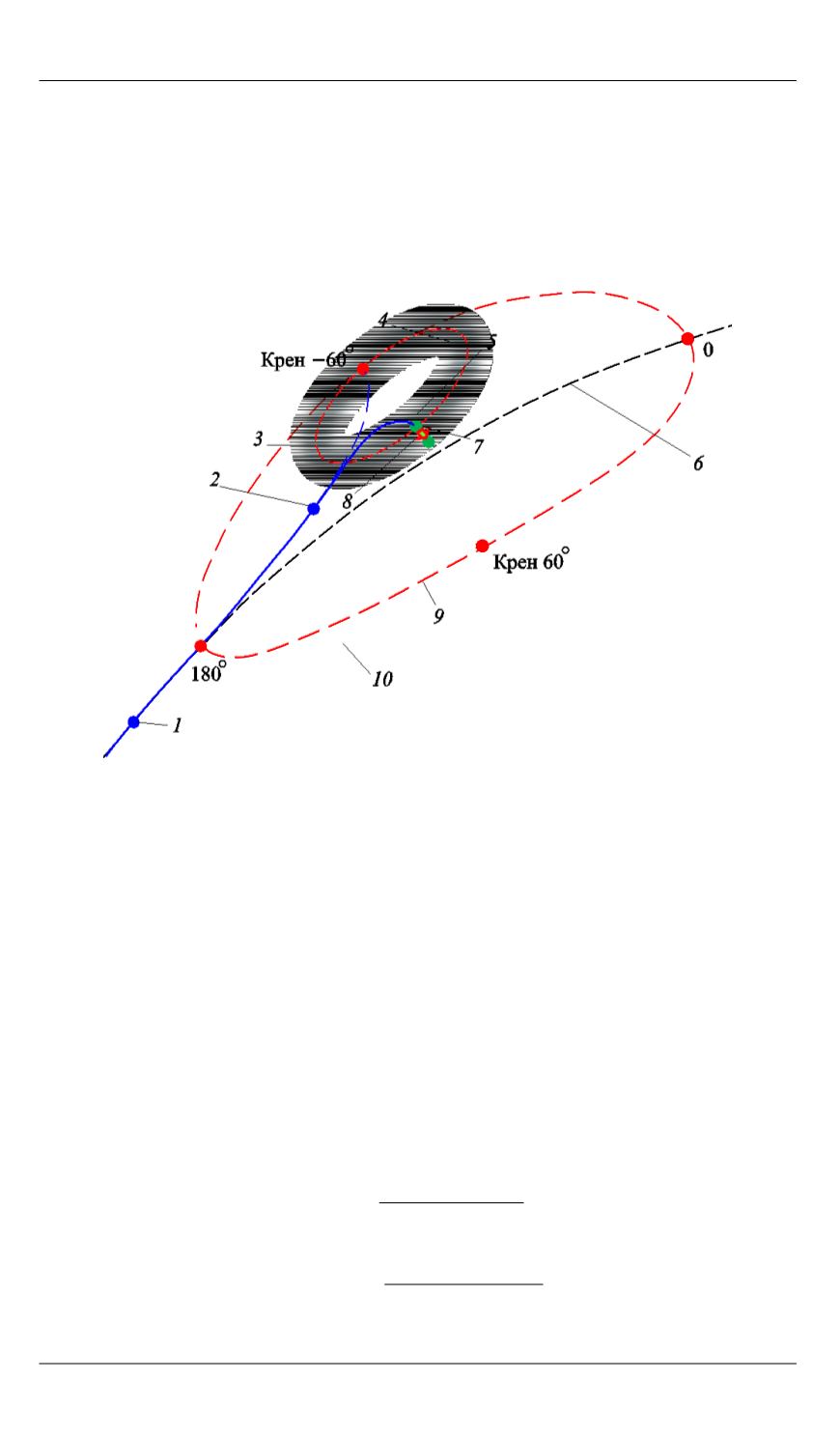
недостаточности бокового маневра ВА. На рис. 3 приведена схема
дополнительного смещения прицельной точки начала работы СМП,
иллюстрирующая применение метода для модификации традицион-
ной схемы решения задачи прицеливания.
Рис. 3.
Схема дополнительного смещения прицельной точки начала работы СМП:
1
— точка входа в плотные слои атмосферы;
2
— точка смены знака угла крена;
3
— грани-
ца номинальной зоны маневра ВА для приведения в прицельную точку;
4
— возможный
разброс границы зоны маневра ВА при приведении в прицельную точку;
5
— область недо-
статочного бокового маневра;
6
— трасса витка посадки;
7
— прицельная точка ввода пара-
шютной системы;
8
— требуемое смещение прицельной точки при сходе с ОИСЗ;
9
— гра-
ница номинальной зоны маневра ВА от входа в атмосферу;
10
— возможный разброс границы
зоны маневра ВА от входа в атмосферу
Алгоритм реализации метода включает в себя расчет дополни-
тельного смещения географических координат прицельной точки по
широте
пр
Δ
ϕ
и долготе
пр
Δ .
λ
Соотношения для расчета
пр
Δ
ϕ
и
пр
Δ
λ
имеют вид:
з.м. бок
пр
З
Δ sin
Δ
;
ϕ =
c L
A
R
(3)
з.м. бок
пр
З
ПТП
Δ cos
Δ
.
cos
λ =
ϕ
c L
A
R
(4)