
















 5 / 14
5 / 14

Метод и алгоритм расчета координат точек прицеливания
…
Инженерный журнал: наука и инновации
# 12·2017 5
и скорости быстро уменьшаются [7, 8]. С учетом данного явления,
путем определения момента смены знака угла крена, когда текущая
граница зоны маневра будет проходить через прицельную ТСМП
(см. рис. 1), обеспечивается решение задачи прицеливания по боко-
вой дальности.
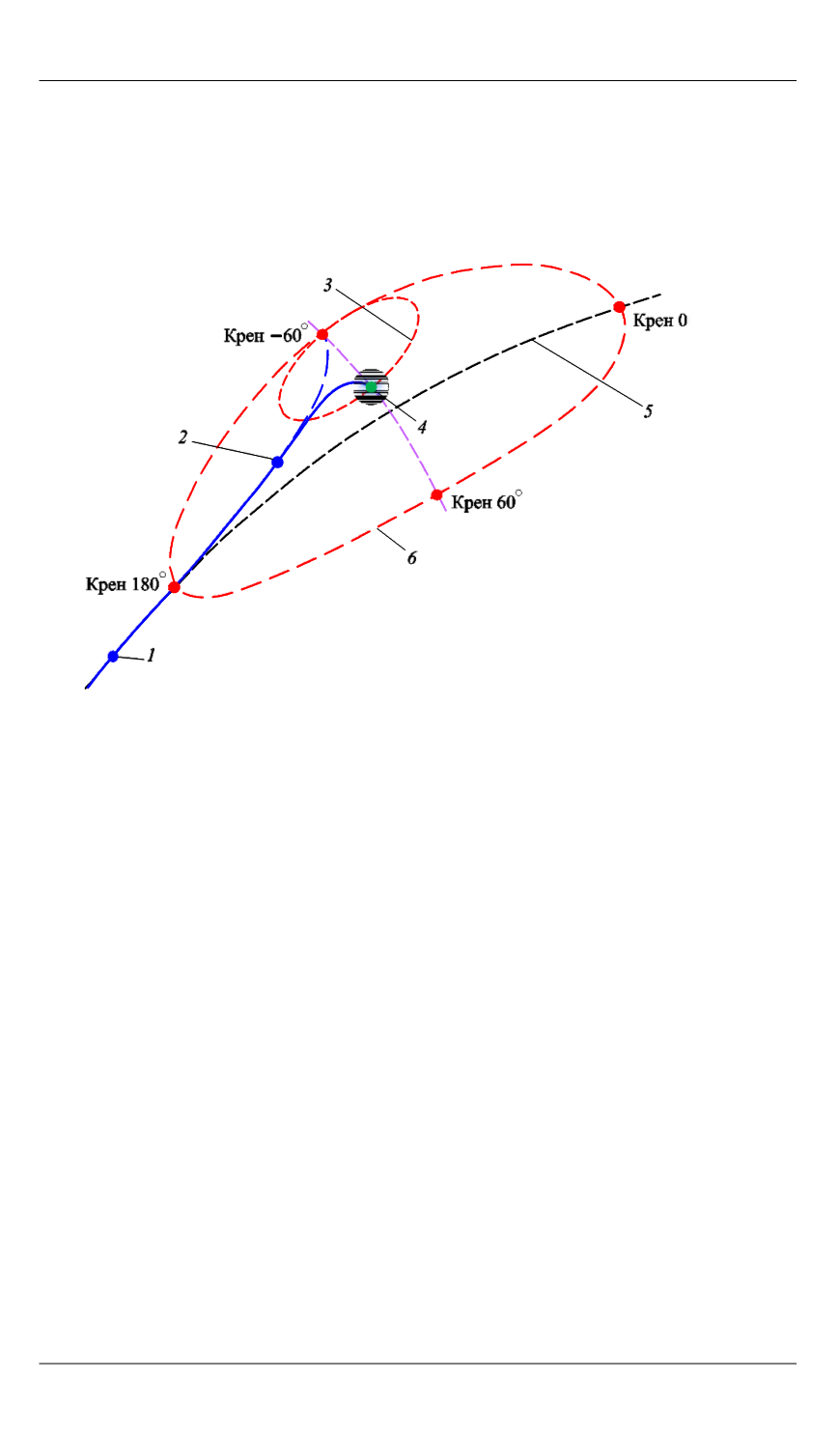
Рис. 1.
Схема прицеливания ВА скользящего типа при спуске с ОИСЗ:
1
— точка входа в плотные слои атмосферы;
2
— точка смены знака угла крена;
3
— граница
номинальной зоны маневра ВА в момент смены знака угла крена;
4
— прицельная точка
ввода парашютной системы;
5
— трасса витка посадки;
6
— граница номинальной зоны
маневра ВА от входа в атмосферу
Такая схема (в первом приближении) применяется для оператив-
ного БНО спусков ТПК типа «Союз». Как отмечено выше, прицель-
ные географические координаты ТСМП определяются с учетом про-
гнозируемого ветрового сноса на участке парашютирования.
Следует отметить, что решение задачи прицеливания выполняет-
ся до начала операций по спуску с ОИСЗ, и для этого могут исполь-
зоваться только
номинальные значения аэродинамических характе-
ристик ВА и параметров атмосферы.
Анализ влияния разброса аэродинамических сил на решение
задачи прицеливания.
Существенной особенностью обеспечения
высокоточной посадки ВА скользящего типа является невозможность
априорного учета разброса аэродинамических характеристик ВА и
случайных вариаций параметров атмосферы. Данные факторы оказы-
вают значительное влияние на размеры зоны маневра. При этом в
случае применения рассмотренного традиционного метода прицели-
вания расположение заданной ТСМП внутри границы фактической