














 4 / 12
4 / 12

С.Е. Постников, А.А. Трофимов, Д.И. Смагин
4
Инженерный журнал: наука и инновации
# 12·2017
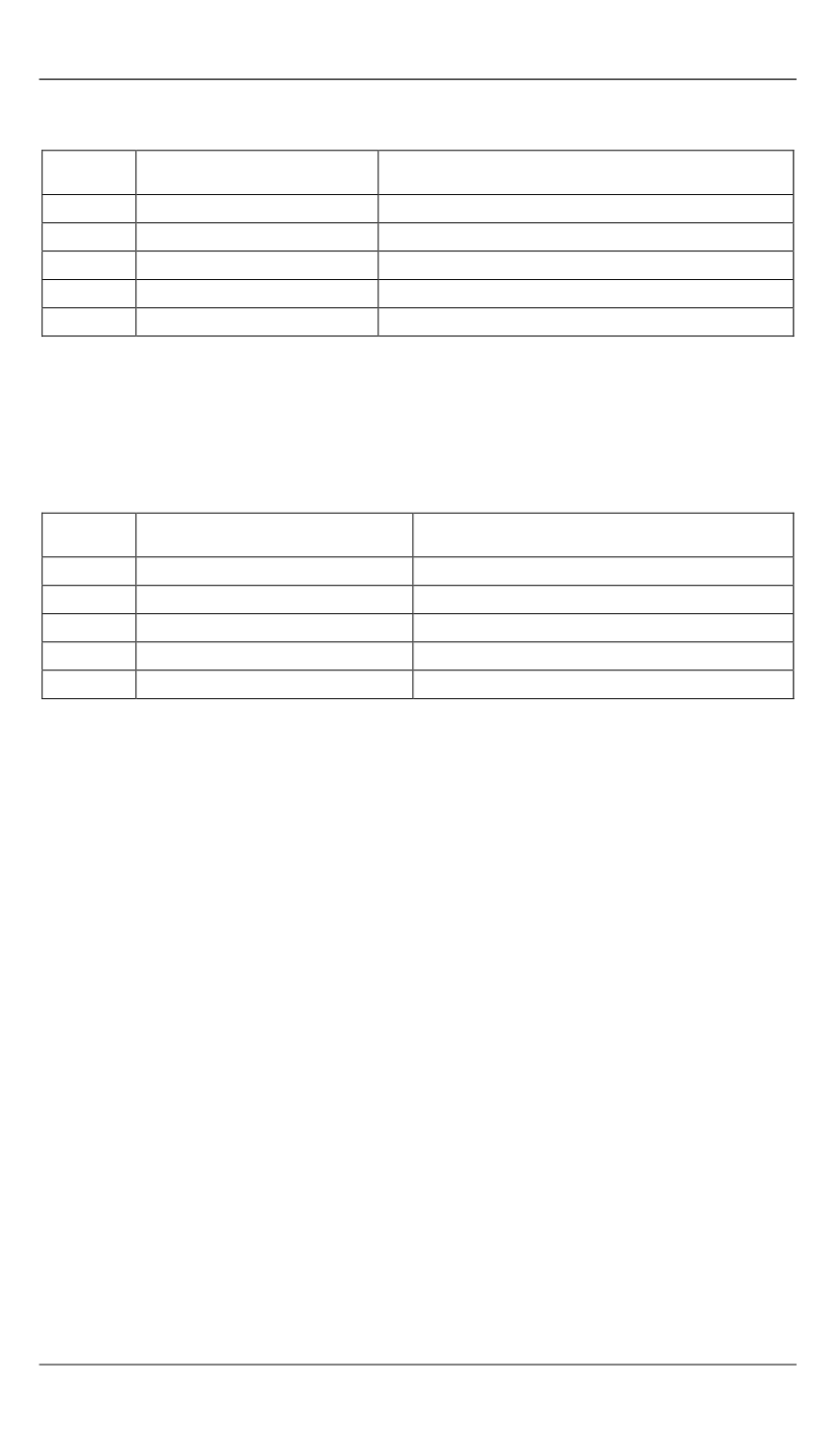
Таблица 3
Вероятность потери управления одной поверхностью руля высоты
Номер
варианта
Вариант компоновки
Вероятность отказа
1
ЭГРП + ЭГРП
4,4
⋅
10
–9
2
ЭГРП + ЭГСП
6,44
⋅
10
–9
3
ЭГРП + ЭМП
9,42
⋅
10
–9
4
ЭГСП + ЭМП
1,37
⋅
10
–8
5
ЭГРП + КП
3,92
⋅
10
–9
Вероятности отказа для управления поверхностью руля направ-
ления при различных вариантах компоновки рулевых приводов при-
ведены в табл. 4.
Таблица 4
Вероятность потери управления одной поверхностью руля направления
Номер
варианта
Вариант компоновки
Вероятность отказа
1
ЭГРП + ЭГРП+ЭГРП
2,92
⋅
10
–13
2
ЭГРП + ЭГРП+ЭГСП
4,27
⋅
10
–13
3
ЭГРП + ЭГСП+ЭГСП
6,24
⋅
10
–13
4
ЭГРП+ ЭГСП + ЭМП
9,14
⋅
10
–13
5
ЭГРП + КП1 + КП2
1,86
⋅
10
–23
Из результатов расчетов (см. табл. 2–4) следует, что все компоно-
вочные решения полностью соответствуют принятому допущению.
Следует отметить, что вариант компоновки с двумя ЭГРП является
наиболее надежным по сравнению с остальными вариантами.
Рассмотренные варианты не учитывают влияния общих точек в
системе управления и не дают полного представления о надежности
системы. Для получения общей надежности в канале управления
необходимо провести комплексную оценку поверхностей, участву-
ющих в управлении самолетом, в отдельном канале.
На основании результатов интенсивностей отказов рассмотрим
несколько архитектурных вариантов системы управления.
Варианты архитектуры системы управления.
Ниже приведе-
ны различные варианты архитектуры системы управления с повы-
шенной степенью электрификации:
•
с уменьшенным числом потребителей ГС;
•
с одной локальной ГС;
•
с двумя централизованными ГС;
•
с одной централизованной ГС.
Расчеты вариантов предложенных архитектур не учитывают вто-
ростепенные поверхности управления, такие как интерцепторы, ста-
билизатор и механизация крыла.