














 3 / 12
3 / 12

Варианты архитектур системы управления для ближне-среднемагистрального самолета
Инженерный журнал: наука и инновации
# 12·2017 3
Следует отметить, что отказ типа «Заклинивание» не учитывался
при учете интенсивности отказов поверхностей управления.
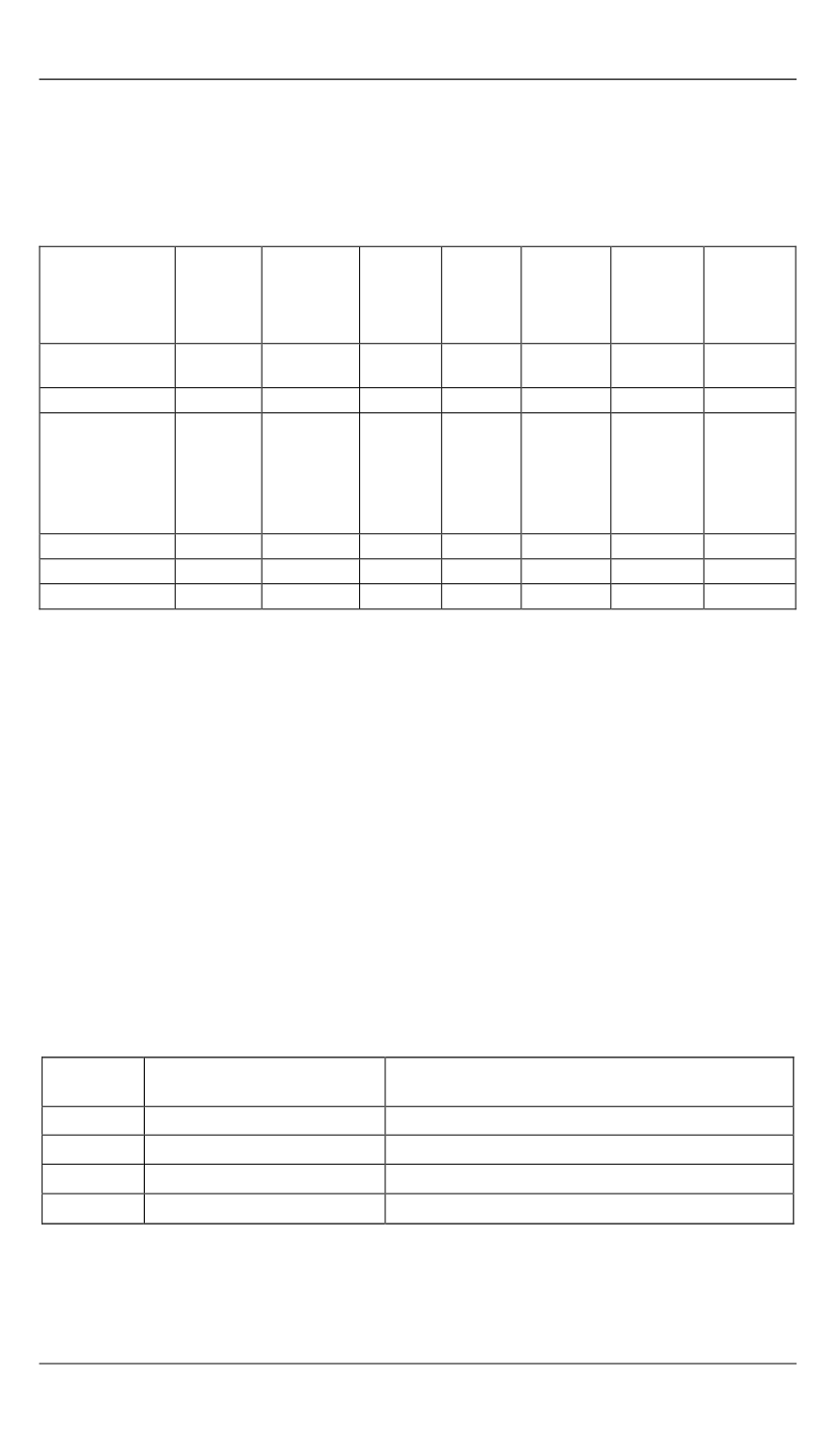
Таблица 1
Усредненные показатели интенсивности отказов
(согласно литературным источникам)
Компонент
системы
управления
[7]
[8]
[9]
[10]
[11]
[12]
Сред-
нее
значе-
ние
ГС
40∙10
–6
—
—
1∙10
–4
1,68 –
2,12∙10
–5
—
5,3∙10
–5
СЭС
10∙10
–6
—
4∙10
–7
—
—
—
5∙10
–6
Электро-
гидравличе-
ский руле-
вой привод
(ЭГРП)
40∙10
–6
25–30∙10
–6
—
10
–7
—
—
1,34∙10
–5
ЭГСП
115∙10
–6
2,20∙10
–5
1,61∙10
–4
—
—
9,2∙10
–5
КП
10∙10
–6
22,7∙10
–6
—
—
—
—
5∙10
–6
ЭМП
—
—
—
—
—
1,37∙10
–4
1,37∙10
–4
Расчет некоторых вариантов компоновки рулевых поверхно-
стей.
Интенсивность отказов силовой части системы управления для
аэродинамической поверхности элерона вычисляют по формуле
(
)(
)
(
)(
)
ЭГРП ГС ЭГРП ГС
элер
элер
элер элер
элер
5
5
5
5
9
5,3 10 5, 3 10 5, 3 10 5, 3 10 4, 4 10 .
−
−
−
−
−
λ = λ + λ λ + λ =
= ⋅
+ ⋅
⋅
+ ⋅
= ⋅
(1)
В качестве примера рассмотрена вероятность отказа двух ЭГРП
элерона. Вероятности потери управления — отказа — для управле-
ния поверхностью элеронов при различных вариантах компоновки
рулевых приводов приведены в табл. 2.
Таблица 2
Вероятность потери управления одной поверхностью элерона
Номер
варианта
Вариант компоновки
Вероятность отказа
1
ЭГРП + ЭГРП
4,4
⋅
10
–9
2
ЭГРП + ЭГСП
6,44
⋅
10
–9
3
ЭГРП + ЭМП
9,42
⋅
10
–9
4
ЭГСП + ЭМП
1,37
⋅
10
–8
Вероятности отказа для управления одной поверхностью руля
высоты при различных вариантах компоновки рулевых приводов
приведены в табл. 3.