














 5 / 12
5 / 12

Групповое применение беспилотных планирующих летательных аппаратов
Инженерный журнал: наука и инновации
# 11·2017 5
рование на примере модели динамики движения БПК ЛА, выполнен-
ного по нормальной аэродинамической схеме с X-образным хвосто-
вым оперением. На оперении установлены рулевые поверхности, на
крыле — элероны. По результатам моделирования формируются
таблицы значений координат навигационных точек
N
i
1
(
X
gi
1
,
Z
gi
1
) для
заданных высотно-скоростных режимов (
H
,
V
).
Выполнив аппроксимацию [10] по найденным координатам
Z
gi
,
определим функциональные зависимости
Z
g
=
f
(
t
i
,
V
0
,
H
0
, Δ, ε), с по-
мощью которых можно получить координаты навигационных точек
для любого БПК ЛА заданной аэродинамической схемы, стартующе-
го в любой момент времени
[
]
1
,
∈
n
t t t
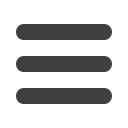
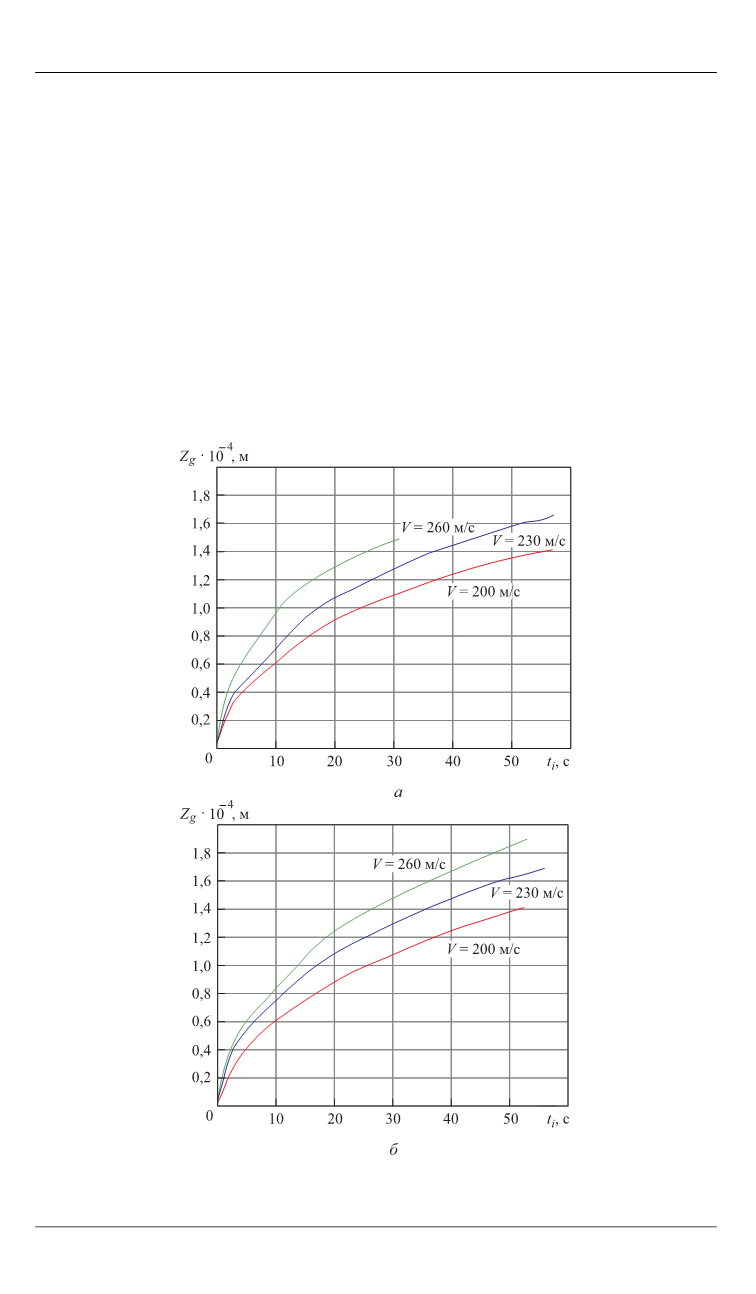
(рис. 3). По этим функцио-
нальным зависимостям можно вычислить координаты НТ для любого
i
-го БПК ЛА.
Рис. 3.
Зависимость расположения навигационных точек от времени сброса:
а
—
H
0
= 10 км,
L
0
= 75 км;
б
—
H
0
= 12 км,
L
0
= 90 км