














 3 / 12
3 / 12

Групповое применение беспилотных планирующих летательных аппаратов
Инженерный журнал: наука и инновации
# 11·2017 3
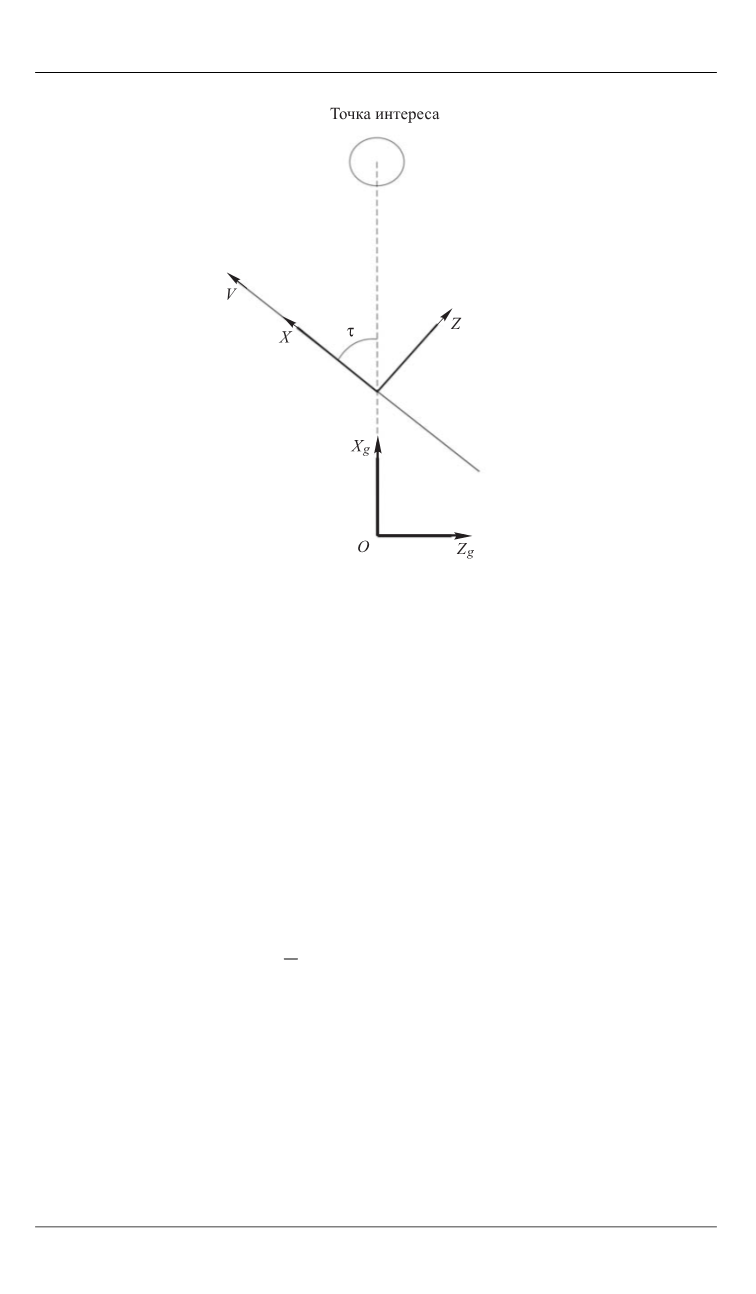
Рис. 1.
Возможные направления полета носителя
стартует некоторое количество летательных аппаратов. Для решения-
задачи примем интервалы между сбросами БПК ЛА фиксированными и
равными Δ
t
= const; в дальнейшем по результатам решения задачи будет
возможно сформировать траекторию полета любого БПК ЛА, начина-
ющего движение в любой момент времени в пределах области приме-
нения алгоритма, о которой будет сказано ниже. Для решения постав-
ленной задачи будем формировать траекторию полета каждого
i
-го ап-
парата с помощью одной навигационной точки (НТ)
N
ij
(
X
ij
,
Z
ij
).
Выбор каждой НТ осуществляется следующим образом.
1.
Рассчитывается значение координаты навигационной точки
по оси
OX
g
как половина длины проекции базовой траектории полета
(рис. 2):
(
)
1
б б
1
,
1, ...,
2
∗
= −
=
gi
i
X
L L i
n
, (1)
где
б
∗
i
L
— проекция на горизонтальную плоскость участка базовой
траектории, пройденного носителем от точки
s
б
(
t
б
) до точки сброса
очередного изделия
s
i
(
t
i
):
б
0 1
cos ,
1, ..., .
∗
+
=
τ =
i
i
L V t
i
n
(2)
Выбор координаты навигационной точки по оси
OX
g
с помощью
формулы (1) не является единственно возможным вариантом, он