














 5 / 14
5 / 14

Моделирование калибровки динамически настраиваемых гироскопов…
Инженерный журнал: наука и инновации
# 10·2017 5
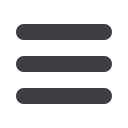
Рис. 3.
Моменты, приложенные к ротору ДНГ в положениях 1 и 2:
ω
x
, ω
y
— компоненты абсолютной угловой скорости движения корпуса гироскопа в системе
координат
xyz
; ω
g
— дрейф гироскопа, обусловленный моментом от несбалансированности,
вызванной смещением центра масс ротора гироскопа вдоль оси его вращения; ω
к
— квадра-
турный дрейф гироскопа;
A
— экваториальный момент инерции ротора ДНГ;
M
x
,
M
y
— воз-
мущающие моменты, приложенные к ротору ДНГ
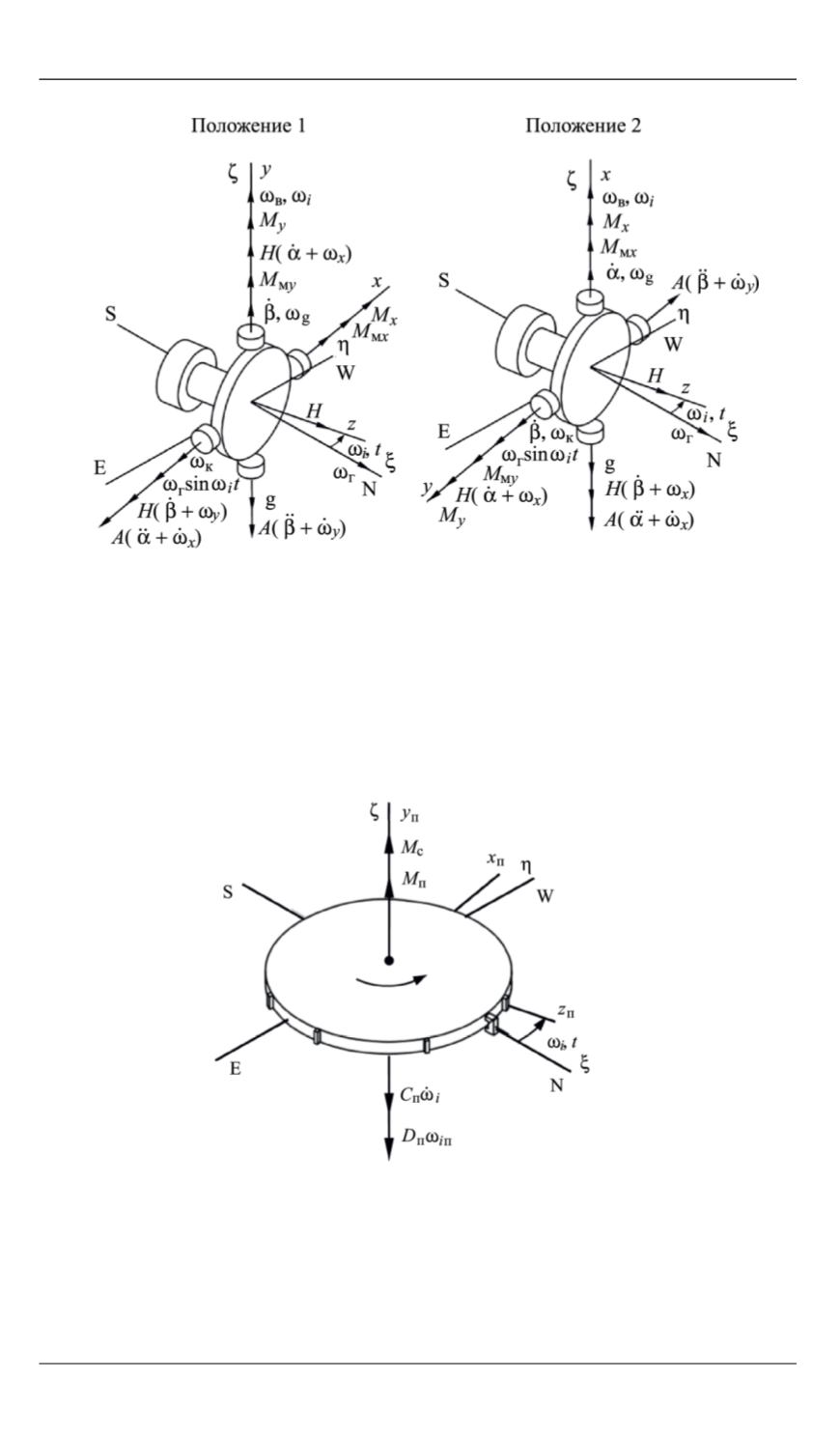
Рис. 4.
Моменты, приложенные к платфор-
ме стенда:
M
с
,
M
п
— моменты сопротивления вращению и об-
ратной связи стенда;
C
п
— момент инерции плат-
формы вокруг оси вращения;
D
п
— коэффициент
демпфирования стенда вокруг его оси вращения