














 3 / 14
3 / 14

Моделирование калибровки динамически настраиваемых гироскопов…
Инженерный журнал: наука и инновации
# 10·2017 3
Платформа вращается относительно неподвижного основания,
причем ось ее вращения расположена по вертикали места испытания.
Гироскоп устанавливается на стенде с помощью кронштейна одной
из калибруемых осей вдоль оси вращения платформы.
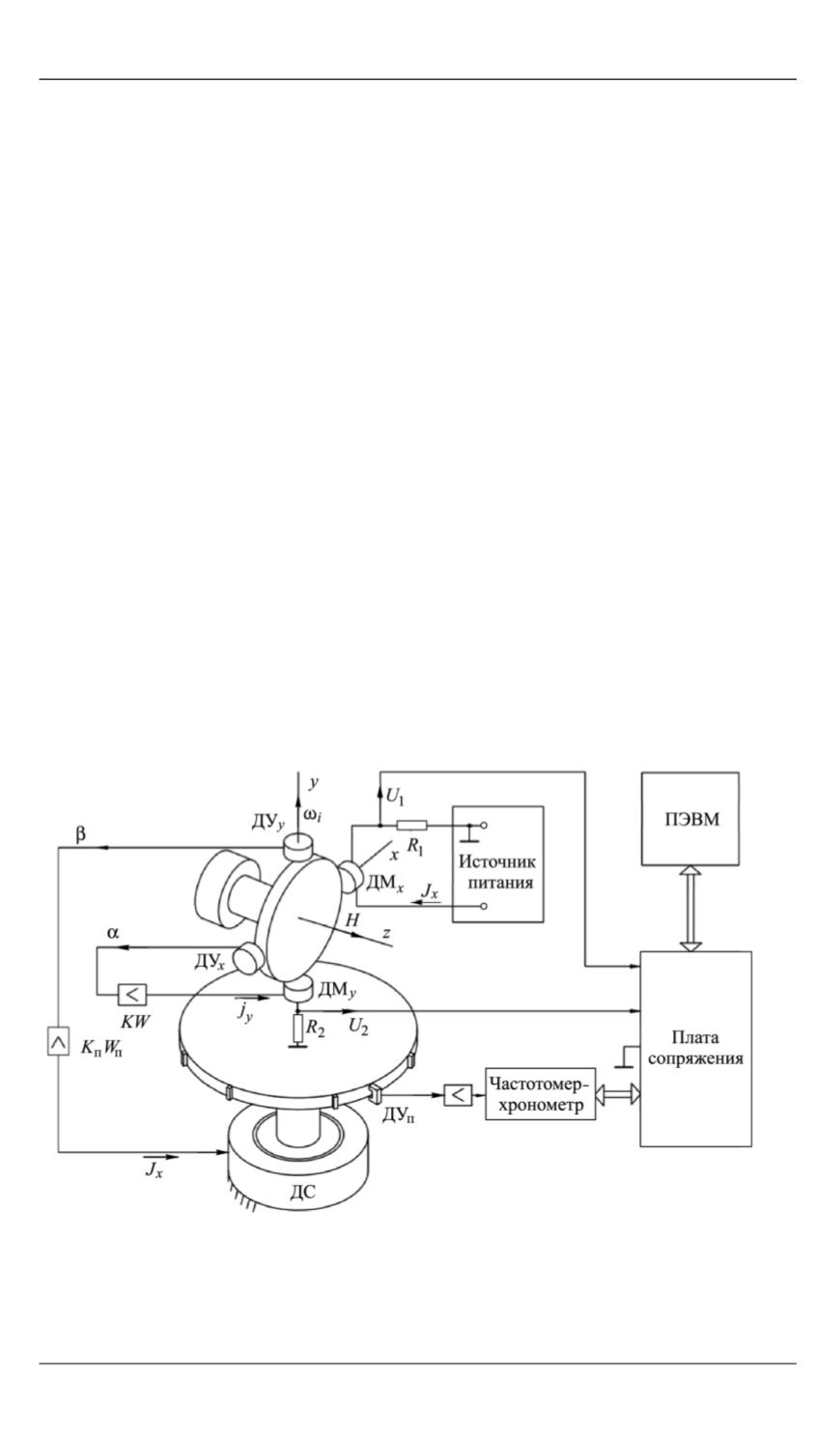
На рис. 2 представлена функционально-кинематическая схема
одноосного поворотного стенда.
При такой методике калибруемый
гироскоп является одновременно и чувствительным элементом стен-
да. В процессе калибровки гироскоп поочередно устанавливается в
положение 1 (ось
y
— ось стабилизации) (см. рис. 2) и затем в поло-
жение 2 (ось
x
— ось стабилизации). В каждом из этих положений сиг-
нал с датчиков угла ДУ
y
(для положения 1) или ДУ
x
(для положения 2)
через фазочувствительный детектор и усилитель мощности подается
на обмотку двигателя разгрузки, который разворачивает платформу в
сторону уменьшения угла рассогласования между ротором и плат-
формой вокруг оси стабилизации.
В моментный датчик канала
x
(для положения 1) или
y
(для по-
ложения 2) подается высокостабильный ток управления от внешнего
источника питания, вызывающий прецессию ротора гироскопа и, со-
ответственно, вращение платформы в положительном и затем отри-
цательном направлениях.
Датчики углов и моментов ортогональных каналов включены, как
показано на рис. 2, в режим «электрической пружины» (ДУС).
Рис. 2.
Функционально-кинематическая схема стенда:
α
,
β
— углы отклонения ротора гироскопа относительно его корпуса;
R
i
,
U
i
(
i
= 1, 2) — из-
мерительные сопротивления и выходные напряжения;
KW
,
K
п
W
п
— передаточные функции
контура обратной связи гироскопа и гиростабилизатора