














 2 / 14
2 / 14

В.П. Подчезерцев, Цинь Цзыхао
2
Инженерный журнал: наука и инновации
# 10·2017
стенде, в основу которого положен принцип работы одноосного ги-
ростабилизатора [8]. Для реализации данной методики необходимо
решение ряда задач: определение уравнений движения комплексной
системы гироскоп — поворотный стенд с учетом особенностей ди-
намики гироскопа и стенда в реальных условиях эксплуатации; моде-
лирование полученных уравнений в среде Simulink с выбором опти-
мальных параметров контуров обратной связи (КОС) гироскопа и ги-
ростабилизатора; оценка влияния собственной скорости вращения
Земли на измерительные характеристики разработанной методики.
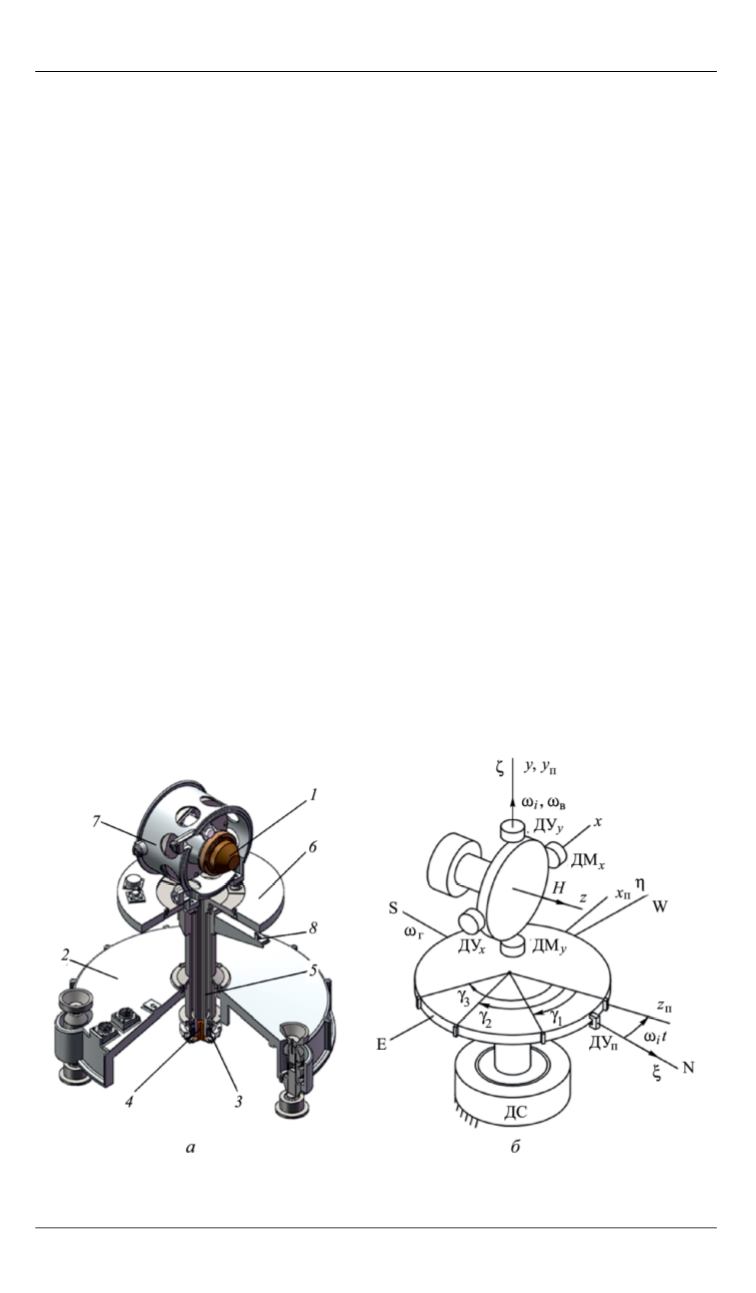
Схема одноосного поворотного стенда.
На рис. 1 приведена ки-
нематическая схема поворотного стенда с установленным на нем ка-
либруемым гироскопом
1
. Представленная конструкция стенда со-
стоит из основания
2
; двигателя разгрузки гиростабилизатора
3
; кол-
лектора
4
, необходимого для передачи информации с испытуемого
прибора и его питания; вала
5
; платформы
6
, кронштейна
7
для уста-
новки гироскопа; датчика угла поворота платформы
8
, статор которо-
го закреплен на основании
2
, а элементы подвижной части зафикси-
рованы на платформе
6
;
xyz
,
x
п
y
п
z
п
,
ξηζ
— системы координат, свя-
занные с корпусом гироскопа, платформой стенда и географической
системой координат; ω
i
— угловая скорость вращения платформы
относительно основания стенда; ω
в
, ω
г
— вертикальная и горизон-
тальная составляющие скорости собственного вращения Земли;
H
—
кинетический момент ротора ДНГ; ДУ
x
, ДУ
y
— датчики угла гиро-
скопа по осям
x
и
y
; ДМ
x
, ДМ
y
— датчики момента гироскопа по осям
x
и
y
; ДС — датчик момента стенда.
Рис. 1.
Общий вид (
а
) и кинематическая схема (
б
) одноосного поворотного стенда