














 9 / 14
9 / 14

Моделирование калибровки динамически настраиваемых гироскопов…
Инженерный журнал: наука и инновации
# 10·2017 9
Для установившегося движения система уравнения (5) может
быть записана в следующем виде:
для положения 1 (
i
= 1, 2)
( )
( )
'
'
0
'
'
0 к
г
в
,
sin
ω + ω ω + ω
+
=
−ω + ω
ω ω
x
xy
xi
y
g
i
yi
x
i
yx
y
K K J
t
j t
t
K K
(7)
для положения 2 (
i
= 3, 4)
( )
( )
'
'
0 к
г
'
'
0
в
sin
.
ω + ω ω ω
+
=
−ω −ω −ω −ω
y
i
x
xy
xi
yi
x
g
i
yx
y
t
K K j t
J
t
K K
(8)
В системах уравнений (7) и (8) измеряемыми величинами являются
токи обратной связи
j
xi
и
j
yi
в моментных датчиках, а также угловые ско-
рости стенда
ω
i
, которые, как видно из этих соотношений, помимо по-
стоянной составляющей, определяются также и гармонической, вызы-
ваемой горизонтальной проекцией собственного вращения Земли. Для
определения масштабных коэффициентов гироскопа необходимо для
каждого из четырех испытаний усреднить измеряемые значения за не-
который промежуток времени
t
. Затем, исключая постоянные составля-
ющие дрейфа гироскопа для положений 1 и 2, получаем систему урав-
нений для определения масштабных коэффициентов:
( )
( )
1
2
3
4
1
2
1
2
3
4
3
4
'
'
'
'
г
'
'
'
'
г
;
,
ω −ω
−
=
−
ω χ γ
ω −ω
−
=
−
ω χ γ
x
xy
x
x
y
y
yx
y
x
xy
x
x
y
y
yx
y
K K J J
j
j
K K
K K j
j
J J
K K
(9)
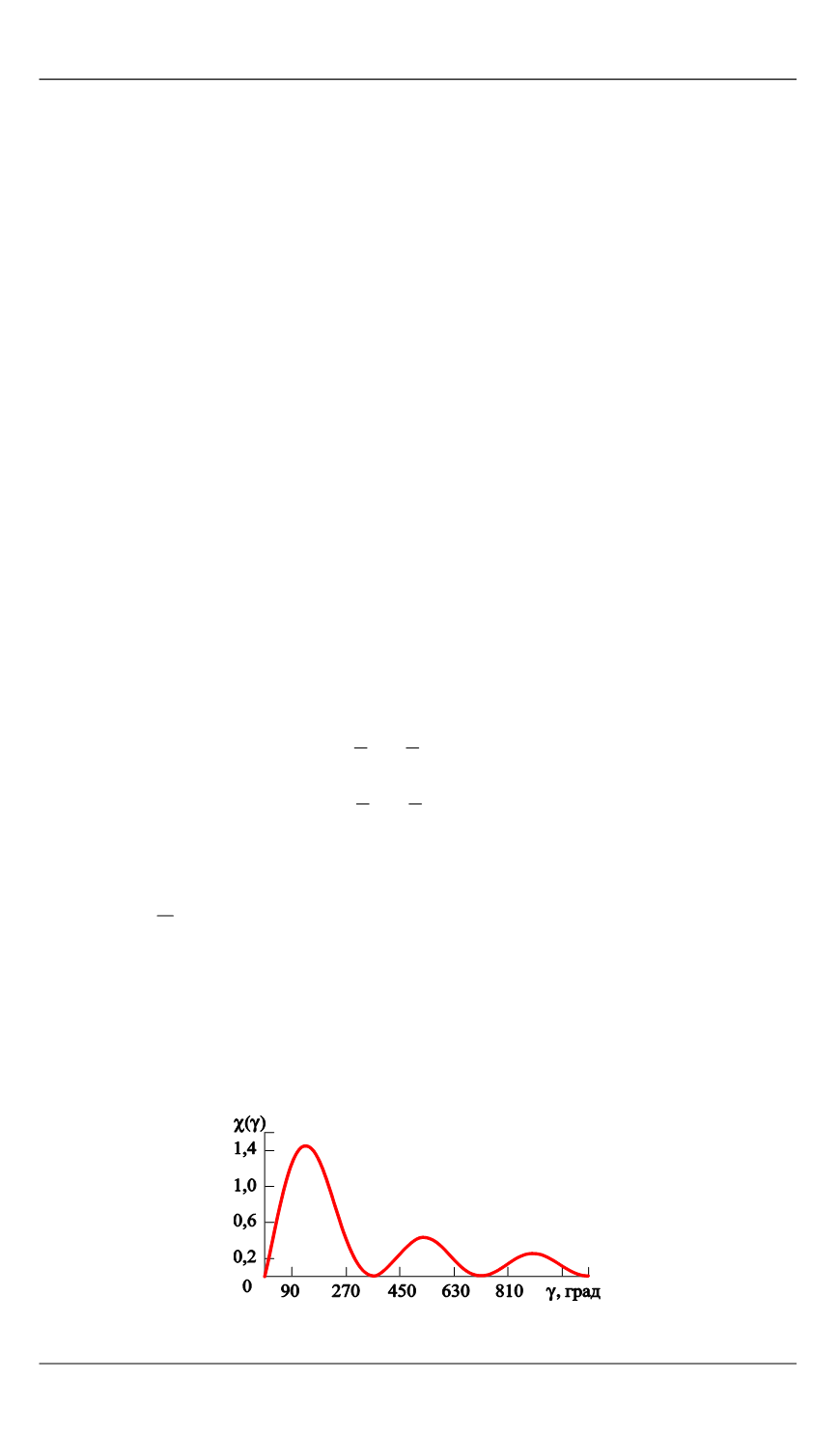
где
2 ( )
(1 cos );
χ γ = − γ
γ
γ — угол поворота платформы за время
t
.
На рис. 8 приведен график зависимости
( ),
χ γ
из которого следу-
ет, что при увеличении времени усреднения эта величина уменьша-
ется, а при усреднении в течение каждого оборота платформы она
строго равна нулю. Таким образом, влияние горизонтальной проек-
ции собственного вращения Земли может быть исключено.
Рис. 8.
График зависимости
( )
χ γ