














 5 / 12
5 / 12

Стабилизация ориентации спутника с помощью двух спарок гиродинов
Инженерный журнал: наука и инновации
# 7·2017 5
движение
0
x
равномерно асимптотически
y
-устойчиво по теореме
Озиранера.
Поведение системы уравнений (5) под действием построенных
управлений (8) при начальных условиях
1
(0) 2, 3
,
2
(0)
2, 4
,
3
(0)
3
,
1
(0)
6
q
,
2
(0)
3
q
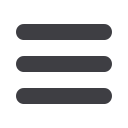
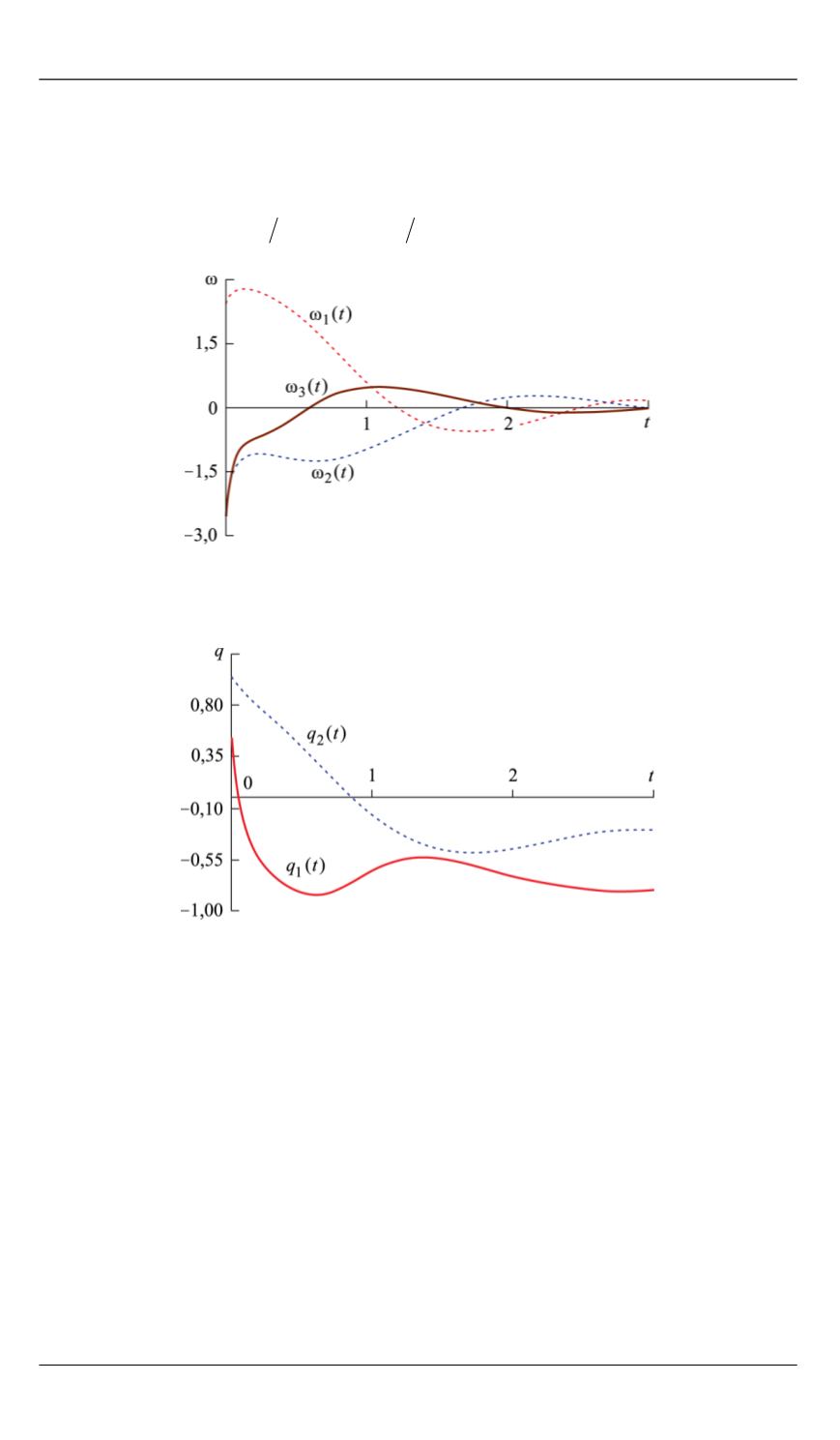
показано на рис. 1 и 2.
Рис. 1.
Проекции угловой скорости:
1
(3) 0,16,
2
(3)
0, 02,
3
(3)
0, 04
Рис. 2.
Углы поворота спарок:
1
(3)
0, 7768,
q
2
(3)
0, 339
q
Стабилизация спутника в направлении заданного орта.
Пере-
ходя ко второму этапу стабилизации ориентации спутника, следует
отметить, что на первом этапе решения задачи угловая скорость вра-
щения спутника была уменьшена до небольшого значения и даль-
нейшая его ориентация в направлении заданного орта может быть
выполнена по линейному приближению [4, 5]. Итак, имеются систе-
ма уравнений (5–7) и невозмущенное движение системы
1
2
3
0,
0,
0,
0
0
1 1 2 2
,
,
q q q q
(0)
1 1
s r
,
(0)
2 2
s r
,
(0)
3 3
s r
,
где
1 2 3
( , , )
s s s
s
,
(0) (0) (0)
0 1 2 3
,
,
r r r
r
— постоянный вектор.