














 10 / 12
10 / 12

А.В. Гладун
10
Инженерный журнал: наука и инновации
# 7·2017
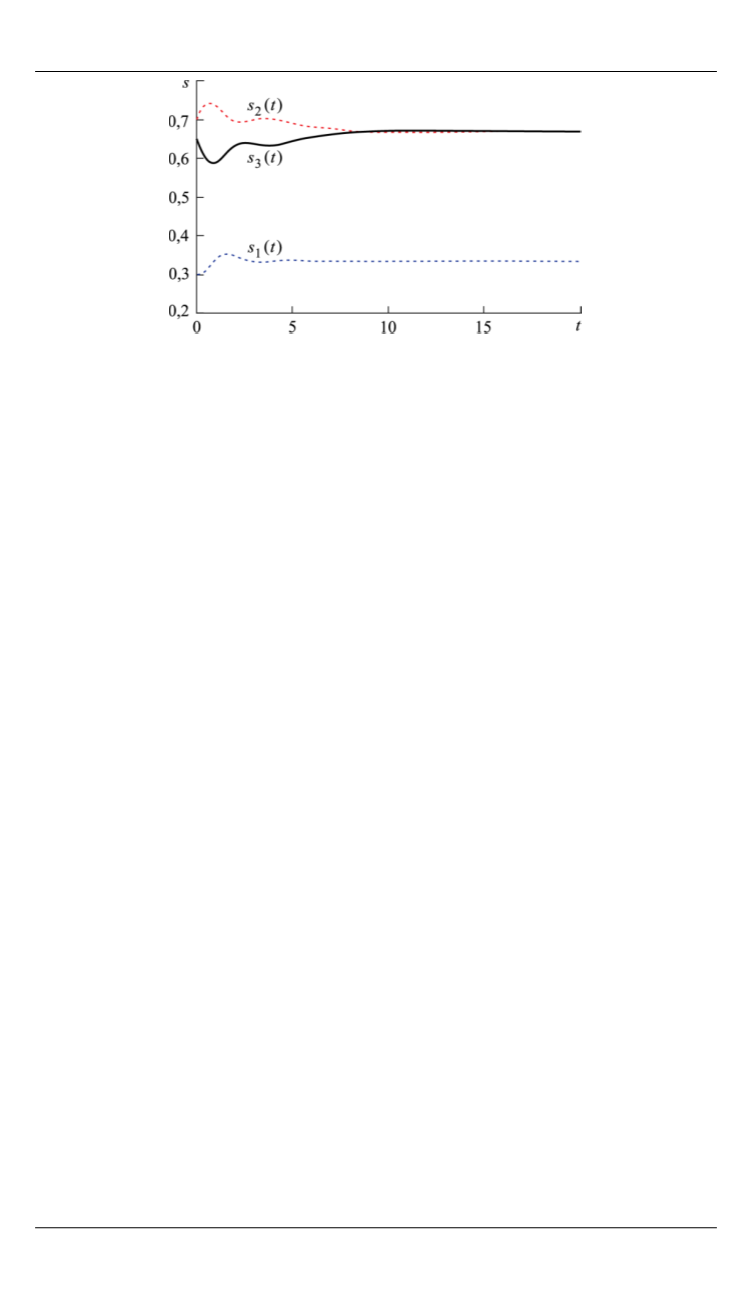
Рис. 4
. Проекции орта
s
0
:
1
20 0, 3333365;
s
2
(20) 0, 666597;
s
3
(20) 0, 666735
s
Как следует из данных на рис. 3 и 4, а также конечных значений
угловой скорости спутника и орта
s
0
, под действием построенных
стабилизирующих управлений
1
,
u
2
u
за
20
t
с угловое вращение
спутника останавливается с точностью до
5
10 ,
и он ориентируется в
направлении заданного орта
r
0
с точностью до
3
10 .
Заключение.
Таким образом, показана возможность решения за-
дачи ориентации спутника в направлении заданного орта с помощью
двух спарок гиродинов. Объединение гиродинов в спарку позволяет
получать более простые уравнения гироскопической системы, удоб-
ные для исследования и применения различных методов построения
управляющих воздействий.
ЛИТЕРАТУРА
[1]
Смирнов Е.Я., Павлинов В.Ю., Щербаков П.П., Юрков А.В.
Управление
движением механических систем.
Ленинград, Изд-во ЛГУ, 1985.
[2]
Зубов В.И.
Лекции по теории управления
. Москва, Наука, 1975.
[3]
Румянцев В.В., Озиранер А.С.
Устойчивость и стабилизация движения по
отношению к части переменных.
Москва, Наука, 1987.
[4]
Гладун А.В. Стабилизация ориентации твердого тела с помощью
гиродинов.
Труды Института прикладной математики и механики НАН
Украины
, 2005, № 10, с. 32–38.
[5]
Гладун А.В. Управление и стабилизация вращательного движения спутника с
помощью двух гиродинов.
Механика твердого тела
, 2013, вып. 43, с. 151–162.
[6]
Красовский Н.Н.
Теория управления движением
. Москва, Наука, 1968.
Статья поступила в редакцию 20.02.2017
Ссылку на эту статью просим оформлять следующим образом:
Гладун А.В. Стабилизация ориентации спутника с помощью двух спарок ги-
родинов.
Инженерный журнал: наука и инновации
, 2017, вып. 7.
http://dx.doi.org/10.18698/2308-6033-2017-7-1637