















 12 / 19
12 / 19

Н.В. Котюженко, Л.А. Савин
12
Инженерный журнал: наука и инновации
# 2
2016
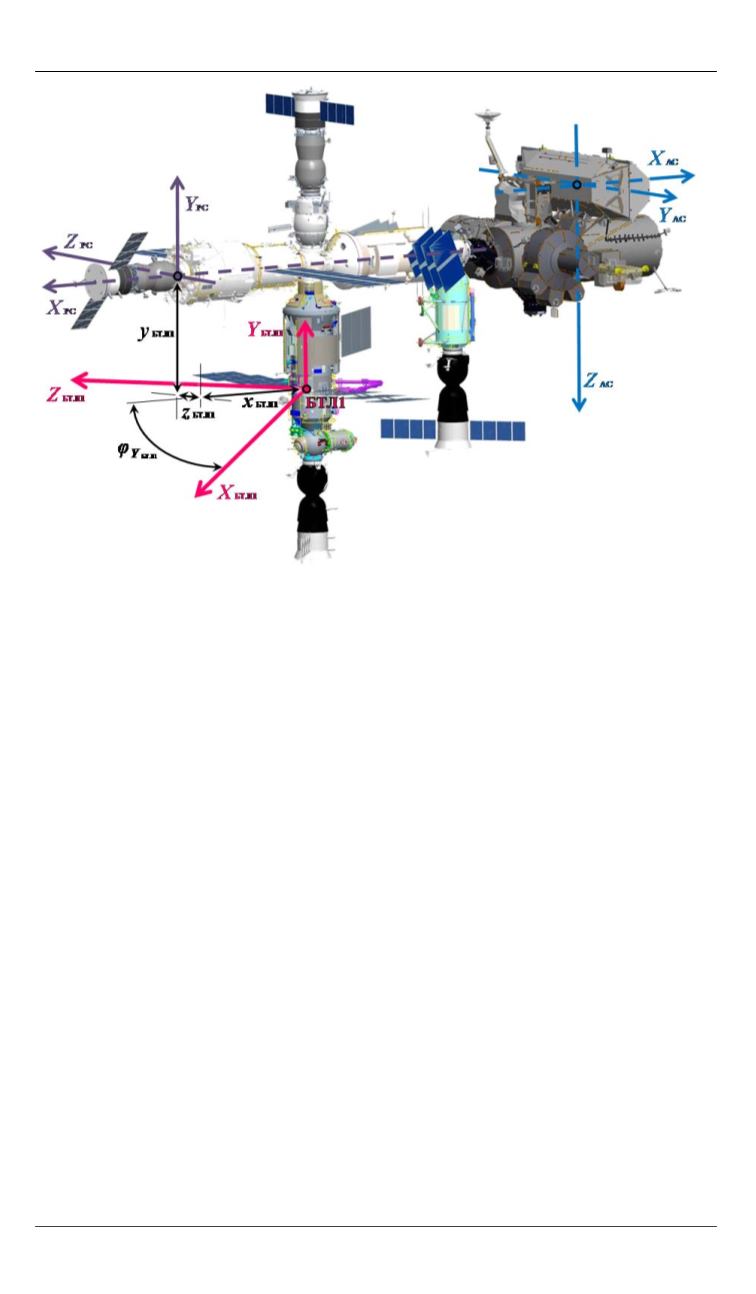
Рис. 6.
Координаты БТЛ1 в системе координат МКС
В примере значения элементов матрицы
M
РС БТЛ1
приведены для
привязки к системе координат Российского сегмента (РС). Поскольку
базовые точки закреплены на поверхности МКС неподвижно (об ис-
ключении для MBS будет сказано далее), а тепловые и динамические
деформации корпуса не учитываются, все элементы матриц
M
одно-
родного преобразования координат для базовых точек являются
постоянными величинами, которые должны быть вычислены и до-
бавлены в алгоритм заранее.
Определить, какая именно базовая точка задействована в текущий
момент, можно по телеметрической информации. При стыковке ма-
нипулятора с базовой точкой происходит стыковка соответствующих
электрических разъемов обоих изделий между собой. В разъемы вве-
дены электрические перемычки, которые замыкают определенные
контакты в ответном разъеме, и, поскольку расположение перемычек
в каждой базовой точке уникально, по телеметрии однозначно опре-
деляется активная в данный момент базовая точка. Однако при пере-
шагивании манипуляторов SSRMS или ERA с одной точки на другую
в определенный момент времени оказываются замкнутыми перемыч-
ки сразу двух точек. Это отдельный случай, он рассмотрен далее вме-
сте со случаем перемены ролей захватов манипуляторов.
Блок основания подвижной системы обслуживания (MBS —
Mobile Remote Servicer Base System) [4] установлен на мобильном
транспортере и способен перемещаться вдоль фермы Американского
сегмента (АС), т. е. параллельно оси
Y
АС
(см. рис. 6 и 7).