















 7 / 19
7 / 19

Графическая трехмерная интерпретация телеметрии манипуляторов
Инженерный журнал: наука и инновации
# 2
2016 7
В манипуляторах, применяемых на МКС, используют только
вращательные одностепенные кинематические пары [1, 4]. Для вра-
щательных сочленений параметры
b
i
,
a
i
и α
i
являются характеристи-
ками сочленения, постоянными для данных типов манипуляторов.
В то же время φ
i
— переменная величина, изменяющаяся при враще-
нии
i
-го звена относительно (
i
– 1)-го. Таким образом, в рассматрива-
емом приложении угол φ
i
есть показания датчика углового положения
в
i
-м шарнире манипулятора. Чтобы не перегружать изображение по-
хожими элементами, на рис. 3 показаны не все относительные системы
координат и геометрические параметры, соответствующие каждому
звену.
На рис. 3 видно, что у манипулятора SSRMS α
2
= α
3
= α
6
= α
7
= 270°,
α
4
= α
5
= 0° [4]. Угловые смещения α у манипулятора ERA имеют точ-
но такие же значения в силу подобия конструкций обоих манипулято-
ров, однако шарниры у ERA иной конструкции, поэтому все параметры
b
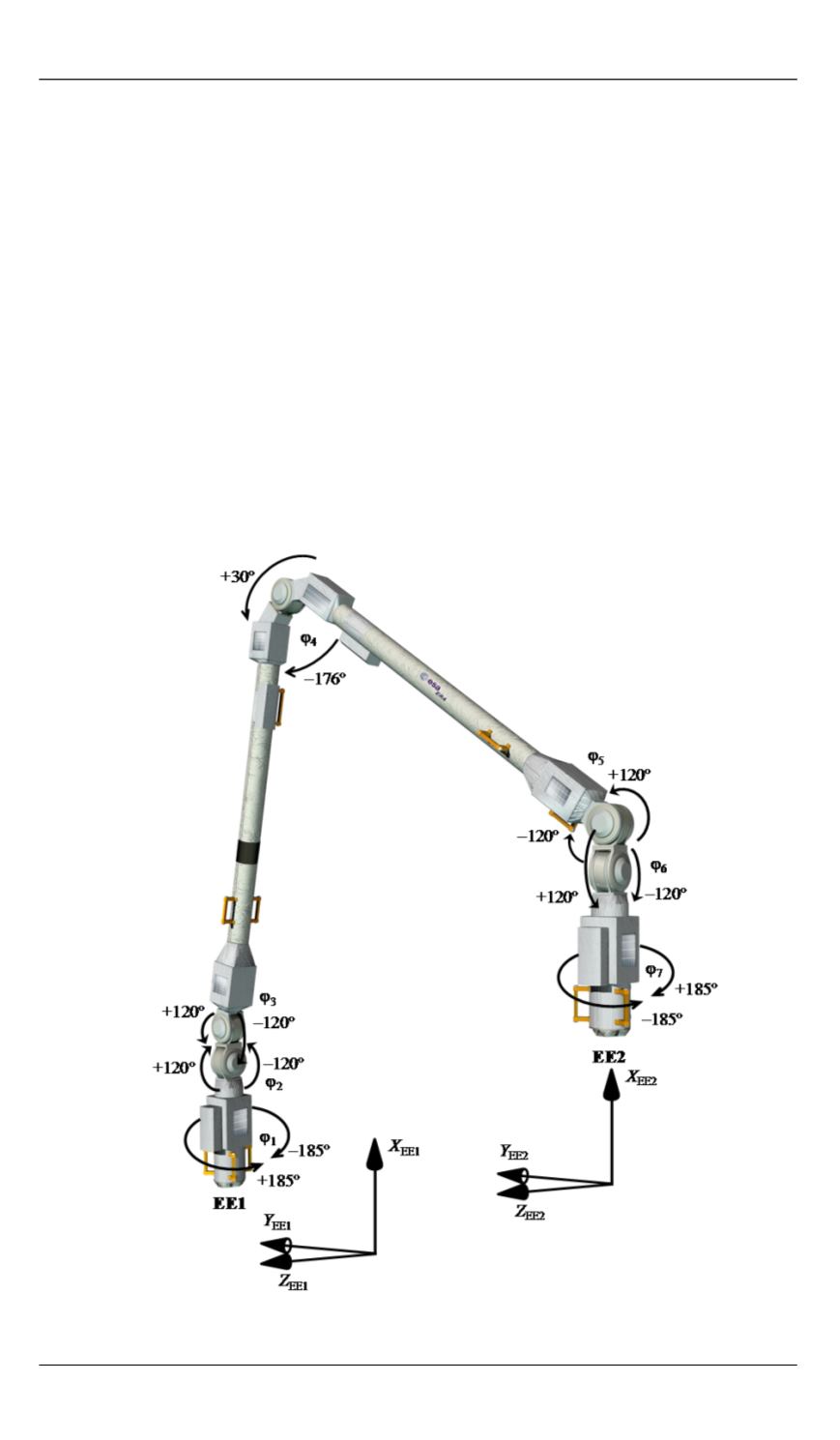
равны нулю. Конструкция манипулятора ERA приведена на рис. 4 [1].
Рис. 4.
Манипулятор ERA