















 13 / 19
13 / 19

Графическая трехмерная интерпретация телеметрии манипуляторов
Инженерный журнал: наука и инновации
# 2
2016 13
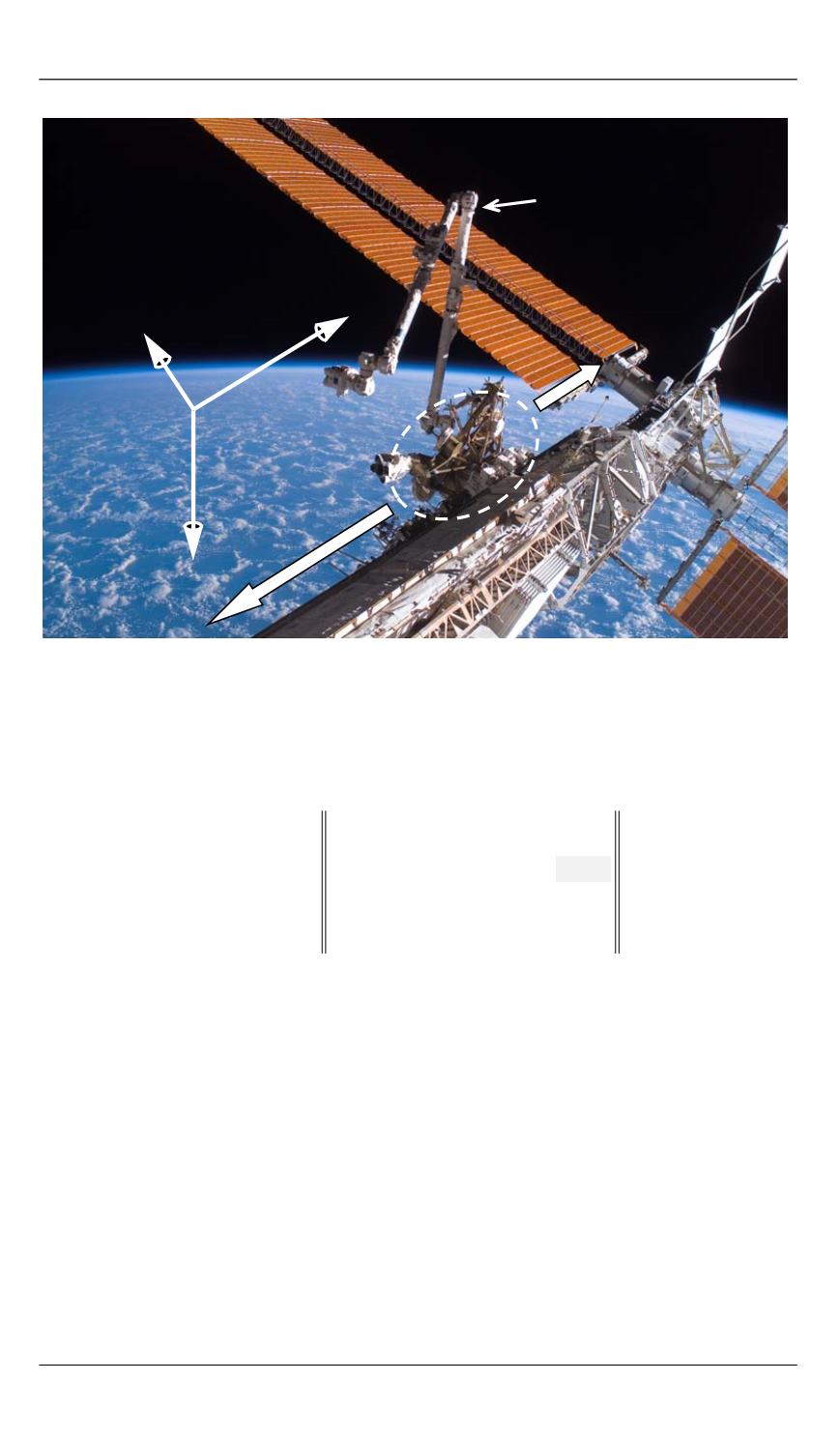
Рис. 7.
Блок основания подвижной системы обслуживания
Для базовых точек, установленных на MBS, матрицы преобразо-
вания координат имеют один переменный элемент — координату
начала отсчета по базовой оси
Y
АС
:
M
АС MBS
=
MBS
const const const const
const const const
const const const const
0
0
0
1
y
.
Для использования в алгоритме графической интерпретации
необходимо к указанной координате привязать показания телеметри-
ческого датчика перемещения транспортера MBS.
В предлагаемом алгоритме должен быть учтен еще один важный
нюанс, который существенным образом влияет на корректность гра-
фической интерпретации телеметрии манипуляторов. Суть его в том,
как манипулятор крепится к основанию (корпусу станции, подвижной
платформе или другому манипулятору). Из всех манипуляторов МКС
только JEMRMS (Japanese Experiment Module Remote Manipulator
System — дистанционный манипулятор японского эксперименталь-
ного модуля) имеет фиксированное крепление к корпусу станции
(рис. 8). Это означает, что крайние звенья этого манипулятора игра-
ют фиксированные роли: за станцию крепится «плечо», свободный
конец манипулятора — «кисть» [4].
Y
АС
Z
АС
X
АС
SSRMS
MBS