















 14 / 19
14 / 19

Н.В. Котюженко, Л.А. Савин
14
Инженерный журнал: наука и инновации
# 2
2016
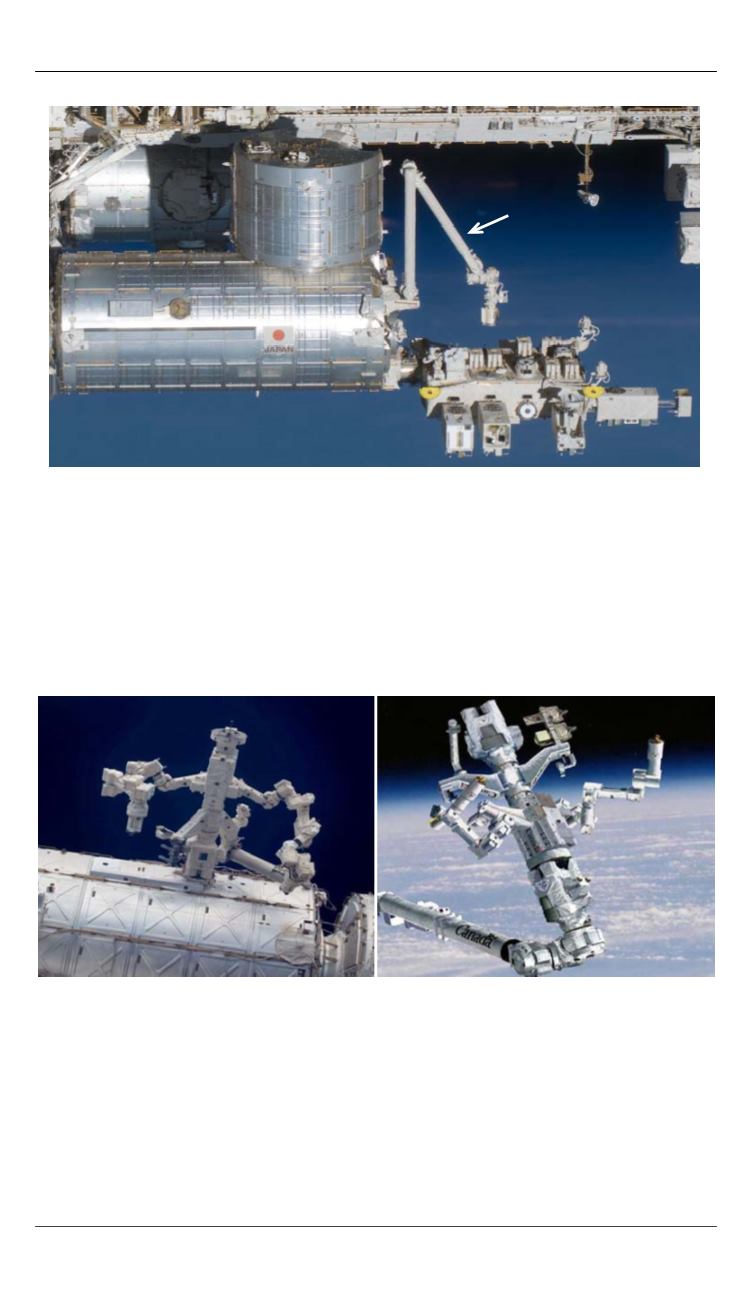
Рис. 8.
Манипулятор JEMRMS
Более сложный случай — манипулятор SPDM (Special Purpose
Dexterous Manipulator — высокоподвижный манипулятор специаль-
ного назначения), «руки» его не меняют своего крепления к «телу»,
но само «тело» может быть закреплено одной стороной к МКС или
MBS, а другой («вверх ногами») — к манипулятору SSRMS (рис. 9) [4].
а б
Рис. 9.
Манипулятор SPDM на модуле LAB (
а
) и на манипуляторе SSRMS (
б
)
Наиболее сложный случай — «шагающие» манипуляторы SSRMS
и ERA [1, 4]. Они могут захватить базовую точку любым из своих захва-
тов. Этот захват принимает роль «плеча», другой становится «кистью».
После перешагивания на другую базовую точку роли захватов меняют-
ся. Меняются только роли, конструктивно каждый захват манипуля-
JEMRMS