














 15 / 19
15 / 19

Моделирование операции приближения космического манипуляционного робота…
15
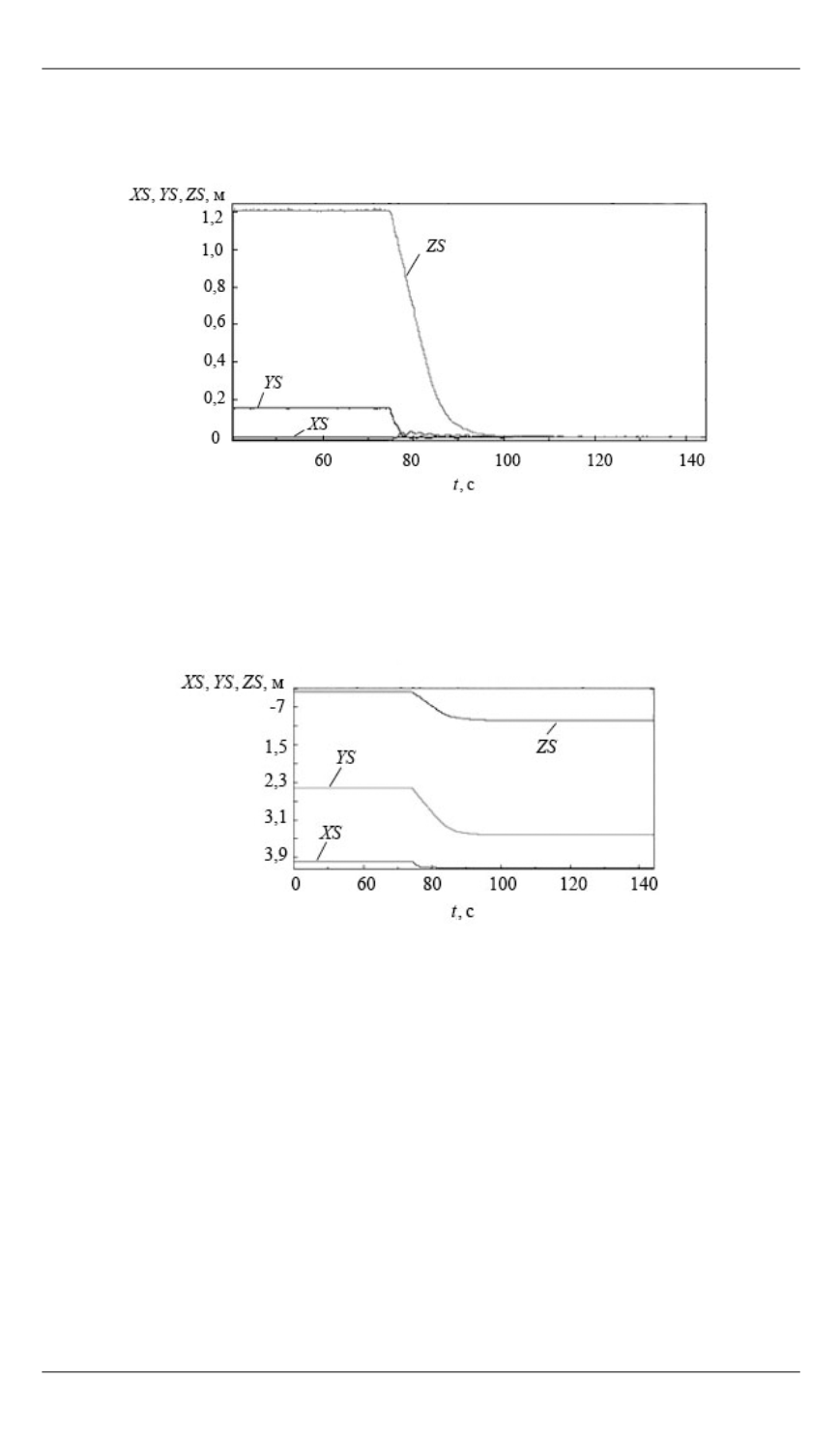
изменения линейных координат захватного устройства манипулятора
(ЗУМ) во время операции (см. рис. 15).
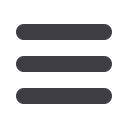
Рис. 14.
Изменение расстояний до целевой точки при вы-
полнении операции наведения с использованием СТЗ:
XS
,
YS
,
ZS
— расстояния до целевой точки по координатам
X
,
Y
,
Z
соответственно;
t
— время, прошедшее с начала реги-
страции
Рис. 15.
Изменение линейных координат ЗУМ КМР
при выполнении операции наведения с использова-
нием СТЗ
Из анализа графиков следует, что после включения (на восьмой
минуте операции) программы наведения линейные и угловые рассо-
гласования плавно уменьшаются до практически нулевых значений
(например, по координате
Z
— от 1,220 до 0,004 м).
Таким образом, эксперименты подтвердили работоспособность
предложенного алгоритма и его устойчивость при выполнении опе-
рации приближения в режиме близкого движения КМР у мишени.
Выводы.
Разработаны алгоритмы и ПО СТЗ для распознавания
элементов мишени и определения координат относительного распо-
ложения камеры и мишени при полунатурном моделировании на базе