














 8 / 19
8 / 19

А.Г. Лесков, В.В. Илларионов, И.А. Калеватых и др.
8
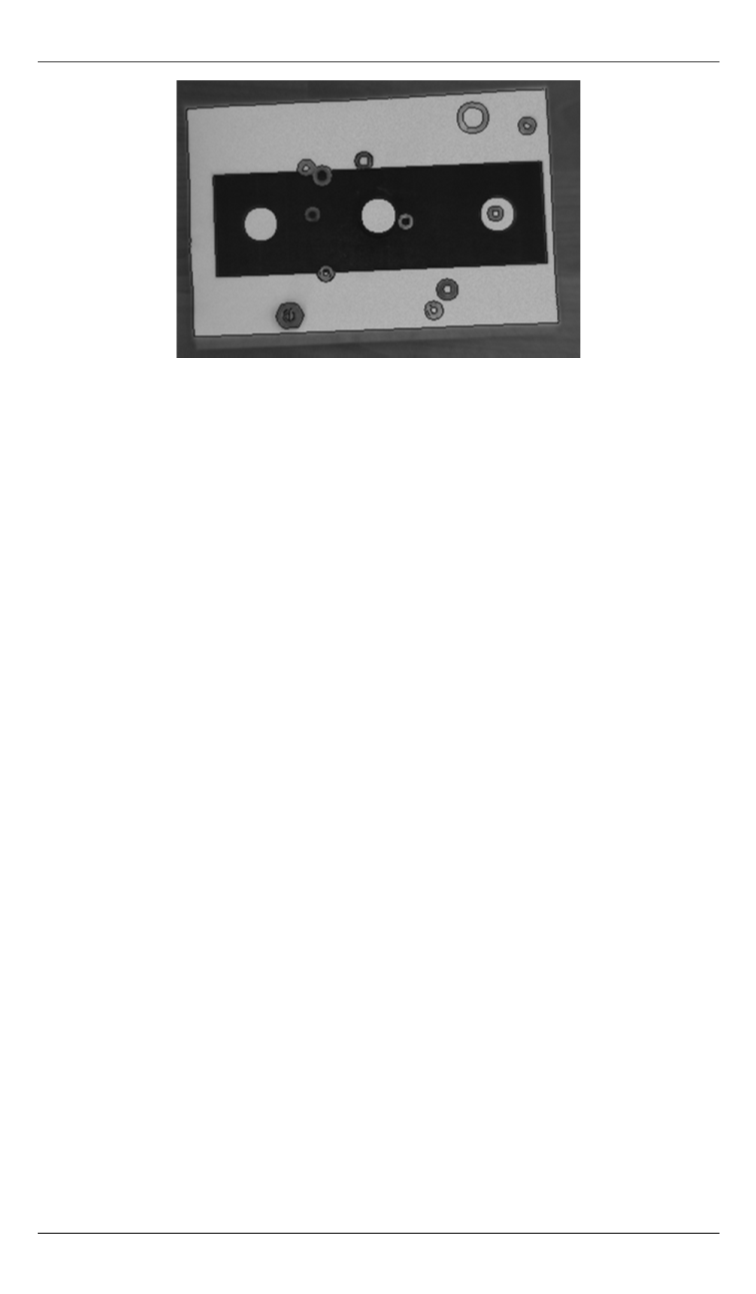
Рис. 4.
Отображение контуров объектов кадра
Поиск окружностей.
В каждом из контуров с
K
точками выби-
рается некоторое число
C
троек точек, равномерно распределенных
по длине контура и равноотстоящих одна от другой на расстояние
K/
3. Вычисление координат центра по трем точкам (
i
— номер трой-
ки,
j
— номер точки в тройке), лежащим на окружности, проводится
по алгоритму. Радиус окружности определяется как расстояние от
центра до одной из точек окружности.
Если оказалось, что по всем взятым на контуре тройкам можно по-
строить окружности и расхождение координат центров этих окружно-
стей не превышает некоторого заданного значения
A
, то контур счита-
ется окружностью. Координаты центра окружности вычисляют как
среднее арифметическое координат всех центров окружностей. За ради-
ус
R
найденной окружности принимается среднее арифметическое зна-
чение радиусов всех найденных
C
окружностей. Если радиус этой
окружности оказался меньше некоторого заданного предельного значе-
ния, контур считается «шумом» и в дальнейшем не рассматривается.
Результат работы алгоритма с кадром (см. рис. 4) представлен на
рис. 5. Видны все выделенные окружности, действительно имевшиеся в
кадре. Однако помимо изображения кругов-реперов мишени в кадре
присутствует так называемый технический мусор (при наведении на ре-
альную мишень КМР в поле зрения камеры могут попасть крепежные
болты и т. п.), а также «шум». Необходимым этапом алгоритма является
выбор в кадре окружностей, принадлежащих мишени.
Поиск эллипсов.
Алгоритм поиска эллипсов использует пред-
ставленный выше алгоритм поиска окружностей. Различие заключа-
ется в предельно допустимом расхождении
e
A
координат центров
окружностей, проводимых через
C
троек точек идентифицируемого
контура. Значение
e
A
устанавливается экспериментально.