














 11 / 19
11 / 19

Моделирование операции приближения космического манипуляционного робота…
11
не имеющие к ней отношения. При разработке алгоритма выявления
ложных изображений следует учитывать, что изображения трех окруж-
ностей мишени должны иметь одинаковые радиусы. Обнаруженные в
поле зрения окружности группируются по признаку близости значений
их радиусов (различия не более 10…15 %). На рис. 9 представлены
сгруппированные окружности (номер группы, в которую попала
окружность, приведен рядом с каждой окружностью). Но в одну группу
с окружностями-проекциями реперов могут попасть и другие окружно-
сти такого же радиуса (именно такой случай изображен на рис. 9 — в
группу попало пять окружностей:
A
,
B
,
C
,
D
,
E
).
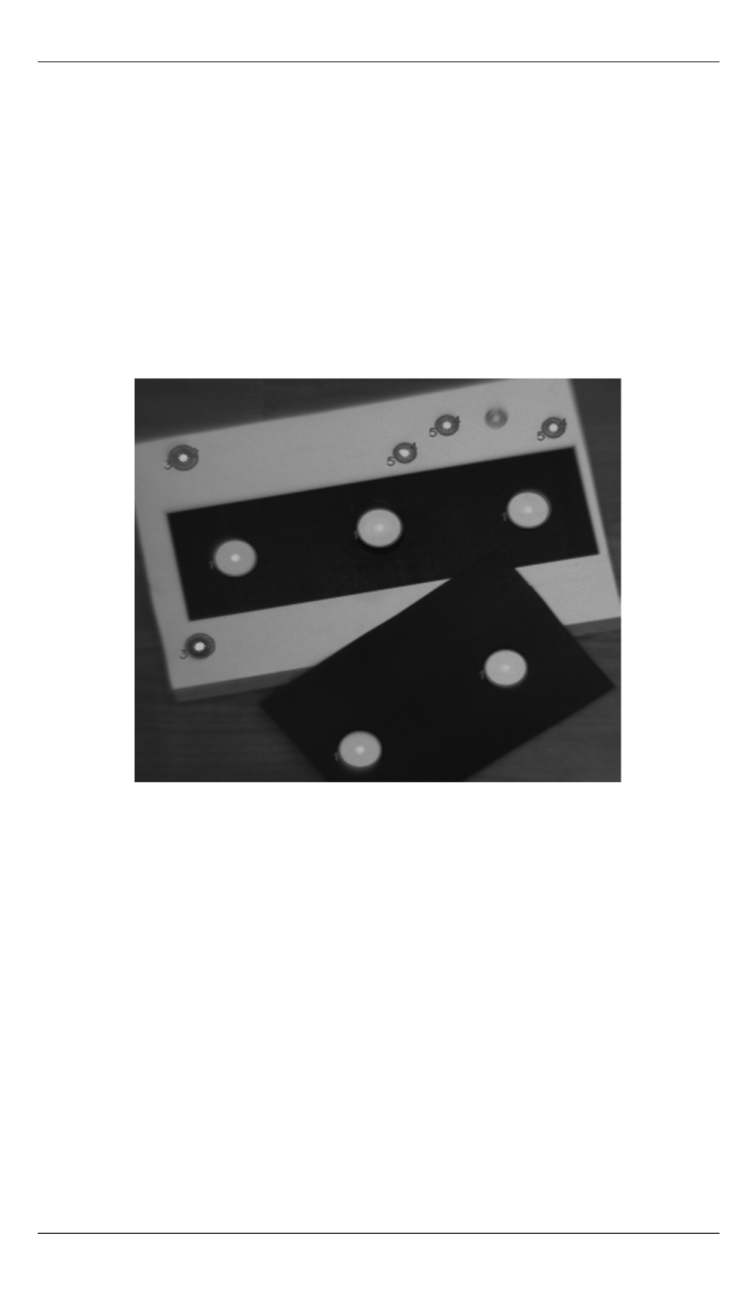
Рис. 9.
Кадр с обнаруженными и сгруппированными окружностями
Известно, что отношение расстояния между центрами боковых ре-
перов мишени к радиусу равно 14. С учетом этого выявим истинные
изображения. Однако и таких пар может быть несколько. Так, на рис. 9
в заданный интервал отношения 14 ± 0,5 попадают две пары окружно-
стей (
A
+
C
и
A
+
E
). Каждая из этих пар может быть изображением бо-
ковых элементов мишени, а линия, проведенная между точками
A
и
C
(или
A
и
E
), может быть горизонтальной осью мишени.
Избежать неоднозначностей можно, найдя проекцию третьей
окружности мишени, т. е. окружности, горизонтальная координата
центра которой находится между горизонтальными координатами
центров двух найденных окружностей (см. рис. 9,
A
+
C
и
A
+
E
). В рас-
сматриваемом кадре обнаружено пять таких случаев (треугольников
A
B
C
D
E