Задача быстродействия при управлении ориентацией двухзвенника…
3
Для определенности по-
ложим
0
C
K
. (2)
За управление
u
примем скорость изменения
угла в шарнире
A
и положим,
что оно ограничено макси-
мальной скоростью серво-
привода:
m
u u
.
Уравнения движения аппарата относительно центра масс имеют
вид
2 0
1
0
1
0
cos
,
.
2 cos
2 cos
C
K
I I
u
u
I
I
I
I
Введем новые переменные:
1
2
,
( )
( ),
D
D
x
x
где
2 0
2 1
1
0
1
0
2 1
1
0
2
2
2
2
1
0
1
0
cos
1
( )
(2
)
2 cos
2
2 cos
2
2
arctg
tg .
2
2
4
4
I I
d
d
I I
I
I
I
I
I I
I
I
I
I
I
I
Тогда
2 0
2
1
0
cos .
2 cos
d
I I
x
d
I
I
Задача минимизации времени разворота аппарата в безопорной
фазе движения имеет вид
1
2
1
,
( ),
x u x
x
(3)
0
0
1
2
1
2
1
2
1
(0)
, (0)
, ( )
, ( ) 0,
D D
x
x x
x x T x
x T
(4)
,
m
u u
(5)
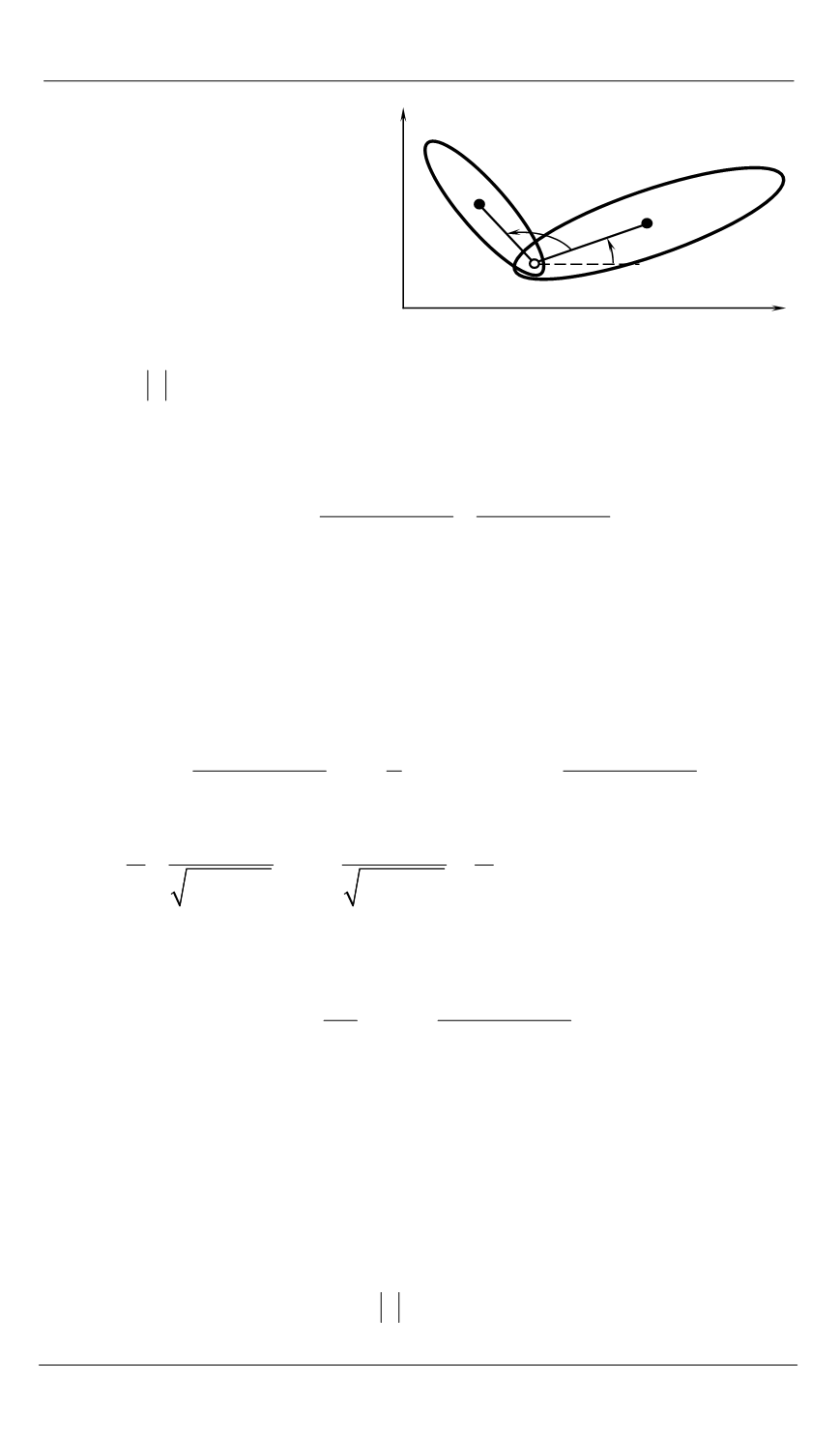
x
y
O
1
C
A
2
C
Рис. 1.
Конструктивная схема аппарата


