П.И. Саркисов, С.Д. Попов
2
V
V
V
V
V
V
V
V
а
б
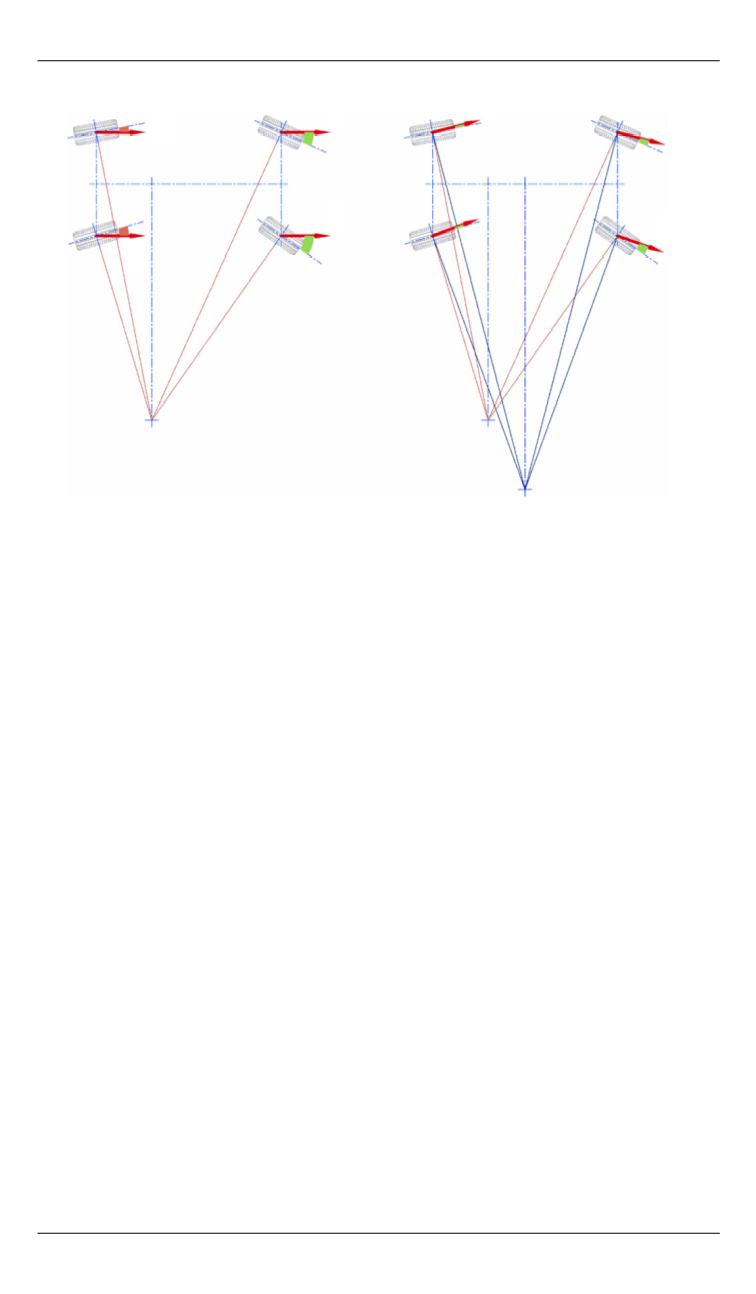
Рис. 1.
Два состояния переходного процесса изменения угла поворота
управляемых колес в момент возникновения угла поворота (
а
) и в
установившемся режиме (
б
) (
V
—
вектор линейной скорости центра колеса)
Упомянутые реакции во многом определяются нестационарным
поведением шины, в том числе и поэтому изучению шин уделяется
большое внимание. В связи со сложностью процессов, происходящих
в шине, учет ее свойств в инженерных расчетах и исследованиях, как
правило, сводится к моделированию шины, т. е. к простому и адек-
ватному описанию поведения упругого тела шины методами матема-
тического моделирования. Сочетать простоту и адекватность удается
лишь для отдельных режимов, что существенно ограничивает воз-
можности моделирования динамических систем, включающих в себя
колесо с шиной (таких как автомобиль).
Основные подходы к моделированию.
В данной работе объек-
том исследования является режим нестационарного качения колеса с
эластичной шиной по плоской недеформируемой поверхности, а
предметом — взаимодействие шины с опорным основанием, т.
е.
взаимосвязь между входными кинематическими параметрами (зако-
ны движения колеса по линейным
( ) ( ) ( )
,
,
x t y t z t
и угловым
( ) ( ) ( )
,
,
t
t
t
ϕ ψ θ
координатам) и выходными силовыми (крутящий
момент
( )
z
M t
, продольная
( )
x
F t
и поперечная
( )
y
F t
силы в пятне
контакта, рис. 2).


