О.Н. Крахмалев
2
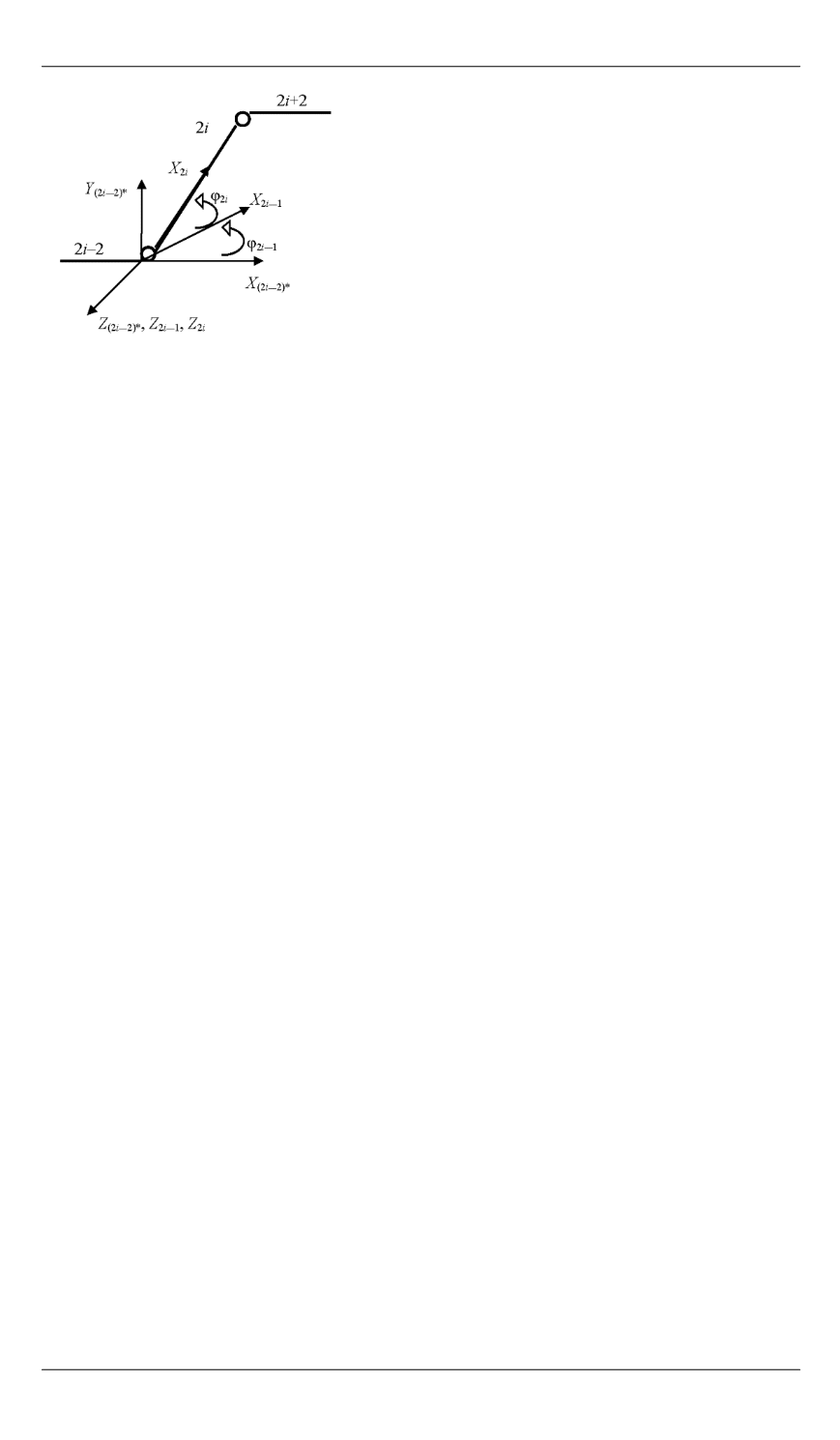
динат, связываемых со звеньями и при-
водами, могут быть определены через
обобщенные координаты, отражающие
их относительные смещения (рисунок):
2 1 2
,
1, ..., ;
i
i
i
q
i
n
(1)
2 1
;
i
i i
p q
(2)
2
1
,
i
i
i
p q
(3)
где φ
2
i
–1
– угол поворота (2
i
–1)-й (нечетной) системы координат, свя-
занной с
i
-м приводом; φ
2
i
– угол поворота 2
i
-й (четной) системы ко-
ординат, связанной с
i
-м звеном;
p
i
– передаточное отношение
i
-го
привода;
n
– число степеней свободы манипуляционной системы.
Моделируя геометрию манипуляционных систем с использова-
нием подхода, при котором с каждым звеном манипуляционной си-
стемы связывают две системы координат, рассмотрим матрицы пре-
образования однородных координат [1].
Если
2 1
j
i
,
1, ..., ,
i
n
матрицы преобразования однородных
координат
*
*
1,
1,( 1) ( 1) ,
( )
( );
j
j
j
j
j
j
j
j
A
A
A
(4)
*
*
*
*
*
*
*
*
*
*
( 1),( 1)
1
1
1
1
( 1)
( 1)
( 1)
1
1
1
1
( 1)
( 1)
( 1)
1
1
1
1
( 1)
( 1)
( 1)
cos (
,
) cos (
,
) cos (
,
)
cos ( ,
) cos ( ,
) cos ( ,
)
cos (
,
) cos (
,
) cos (
,
)
0
0
0
1
j
j
x
j
j
j
j
j
j
j
y
j
j
j
j
j
j
j
z
j
j
j
j
j
j
j
A
X X
X Y
X Z
l
Y X
Y Y
Y Z
l
Z X
Z Y
Z Z
l
; (5)
*
( 1) ,
cos (
) sin (
) 0
0
sin (
) cos (
) 0
0
( )
,
0
0
1 (1 )
0
0
0
1
j j
j j
j j
j j
j
j
j
j
j
A
(6)
где β
j
= 1, если
j
-я кинематическая пара вращательная, и β
j
= 0, если
поступательная.
Из (1) следует, что типы кинематической пары привода и соот-
ветствующего ему звена одинаковы, т. е. β
j
= β
i
. С учетом этого про-
ведем замену переменных согласно (2) и будем иметь


