А.Г. Лесков, А.В. Яскевич, В.В. Илларионов, С.Д. Морошкин, И.Е. Чернышев
4
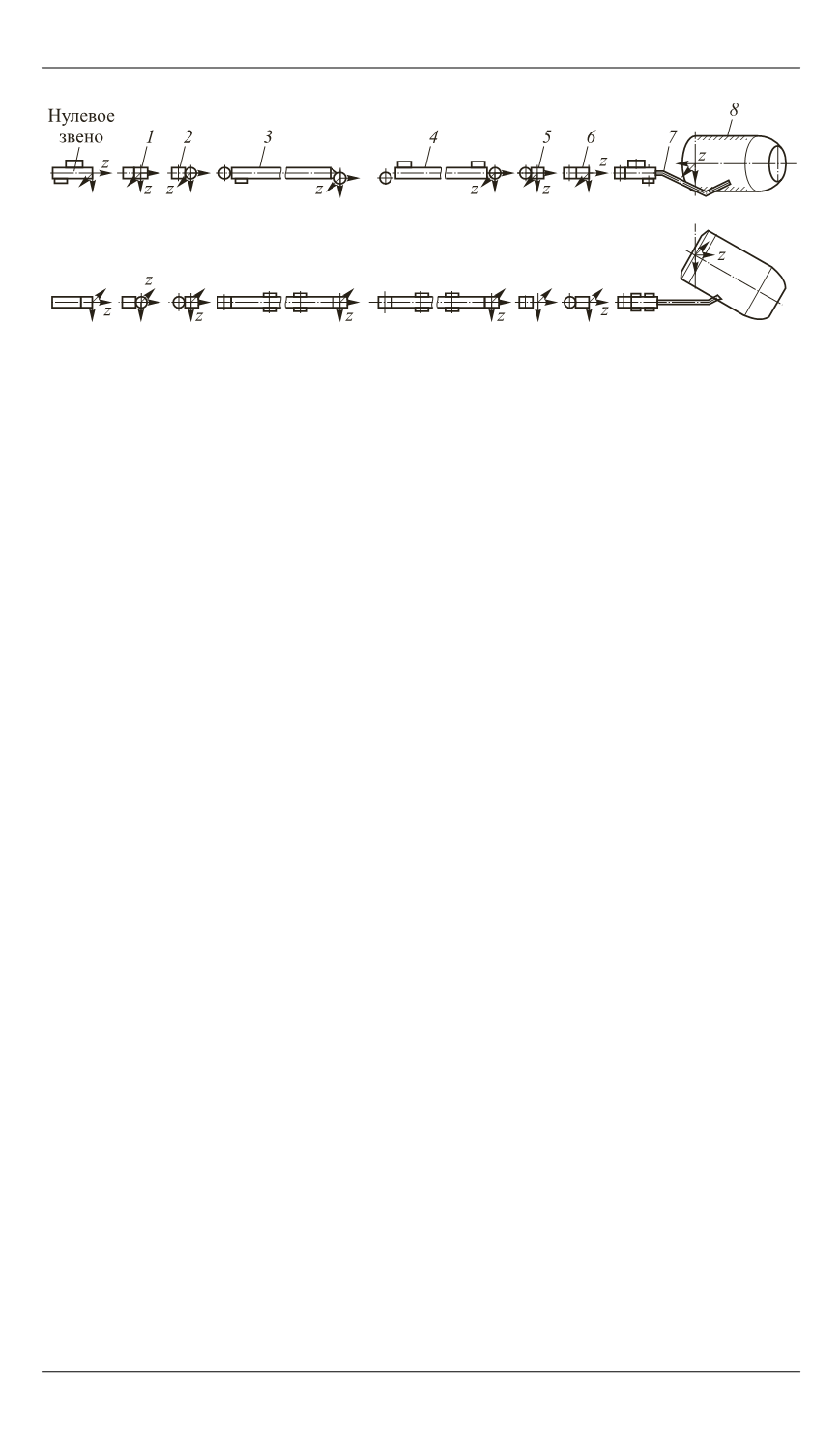
ли звенья
0
,
1
,
2
,
5
и
6
— абсолютно жесткие тела, звенья
3
,
4
и
7
—
упругие. Звенья
1
–
6
— это элементы конструкции манипулятора. Со-
ставное звено включает в себя адаптер
7
, ЗУМ и шлюзовую камеру
8
.
При моделировании процессов перемещения и стыковки ТДР в со-
ставное звено входят ЗУМ и ТДР. Нулевое (базовое) звено считается
неподвижным основанием.
Уравнения движения составляются в форме Лагранжа 2-го рода.
В общем виде эти уравнения получены в работах [6, 7]. Для описания
динамики упругих колебаний применяется модальный метод. При
этом рассматриваются только 1-е моды колебаний каждого из упру-
гих звеньев. Упругие деформации полагают малыми и исключают
векторы центробежных и кориолисовых сил «упругой» составляю-
щей движения.
В результате уравнения принимают следующий вид:
в
д
в
;
.
qq
q
q
q
A A
A A
K
ψ
ψ
ψψ
ψ ψ
+ + = +
+
= −
q ψ b μ μ
q ψ μ
ψ
(1)
Здесь
q
— вектор координат сочленений размером 7
×
1;
ψ
— вектор
модальных координат размером 9
×
1;
,
,
qq q
A A A
ψ ψψ
— компоненты
симметрической матрицы инерции системы;
b
— вектор центробеж-
ных и кориолисовых сил;
в
q
μ
— приведенный к шарнирам вектор
внешних сил и моментов;
в
ψ
μ
— вектор внешних сил и моментов,
приведенный к модальным координатам;
д
μ
— вектор моментов,
развиваемых приводами;
K
ψ
— матрица статических модельных ко-
эффициентов размером 9
×
9.
Вычислительный алгоритм моделирования ИМ с упругими зве-
ньями аналогичен алгоритму ИМ с жесткими звеньями и включает
две фазы:
• расчет коэффициентов матриц и векторов уравнений (1);
• решение методом численного интегрирования дифференциаль-
ных уравнений ИМ совместно с уравнениями приводов.
Рис. 2.
Схема исполнительного механизма манипулятора


