Математический стенд для отработки управления манипулятором ERA…
3
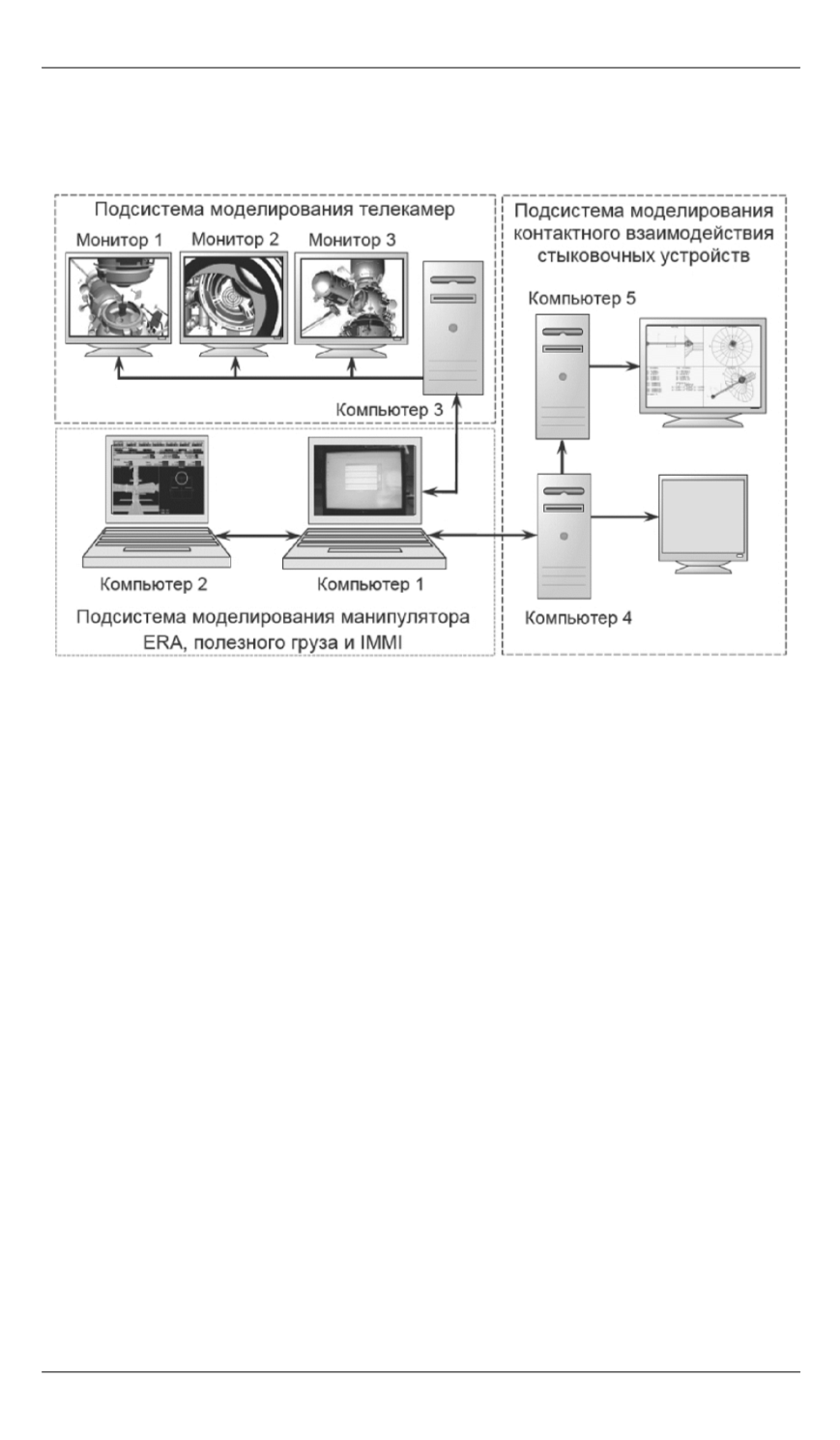
ответствующая программа, отображающая относительное положе-
ние элементов СтУ и их точки контакта, функционирует на компь-
ютере 5.
Рис. 1.
Структурная схема математического стенда для отработки управле-
ния манипулятором ERA на контактной фазе операций причаливания
Математическая модель манипулятора ERA.
В состав матема-
тической модели манипулятора входят три основные подсистемы:
• динамика исполнительного механизма манипулятора с объек-
том и приводами;
• планировщик траекторий;
• имитатор пульта внутреннего интерфейса.
Ниже приведено описание алгоритмов работы подсистем матема-
тической модели.
Динамика исполнительного механизма.
Исполнительный меха-
низм (ИМ) манипулятора ERA состоит из восьми звеньев (рис. 2).
ИМ представляет собой симметричную по длине конструкцию. Кон-
цевые звенья ИМ — захватные устройства (ЗУМ). С помощью ЗУМ
манипулятор прикрепляется к базовой точке на поверхности МКС.
Второй ЗУМ служит для захвата и удержания объектов манипулиро-
вания — шлюзовой камеры (ШК) и теплоотводящего дополнительно-
го радиатора (ТДР). ШК удерживается манипулятором с помощью
механического адаптера.
Звенья нумеруют, начиная от основания. С каждым из звеньев
связана правая ортогональная система координат так, что ее ось
z
направлена вдоль оси вращения соответствующего шарнира. В моде-


