А.Г. Лесков, А.В. Яскевич, В.В. Илларионов, С.Д. Морошкин, И.Е. Чернышев
10
• планирование заданной траектории движения ЗУМ в автомати-
ческом режиме и расчет заданной траектории при управлении в руч-
ном режиме;
• решение ОКЗ и проверка индексов сингулярности;
• совместное интегрирование уравнений ИМ, приводов и диффе-
ренциальных уравнений ручных режимов;
• регистрация в память системы с последующим копированием в
файл заданного объема информации с заданным интервалом;
• синхронизация по реальному времени.
Поток К обеспечивает на каждом шаге своего цикла сетевой об-
мен данными с клиентами (пульт управления, подсистема моделиро-
вания телекамер).
Значение кванта времени, выделяемого каждый раз каждому из
потоков, определяется ОС Windows и зависит от мощности и числа
задействованных процессоров, наличия других процессов, их прио-
ритетов и т. д. При этом потоки могут прерываться и затем вновь
возобновляться. Значение выделяемых им квантов времени может
колебаться в широких пределах, и в некоторые моменты времени шаг
интегрирования может стать недопустимо большим (с точки зрения
устойчивости процесса).
Для предотвращения такой ситуации разработан следующий ал-
горитм синхронизации. Численное интегрирование выполняется ме-
тодом Эйлера. Предварительно экспериментально определены значе-
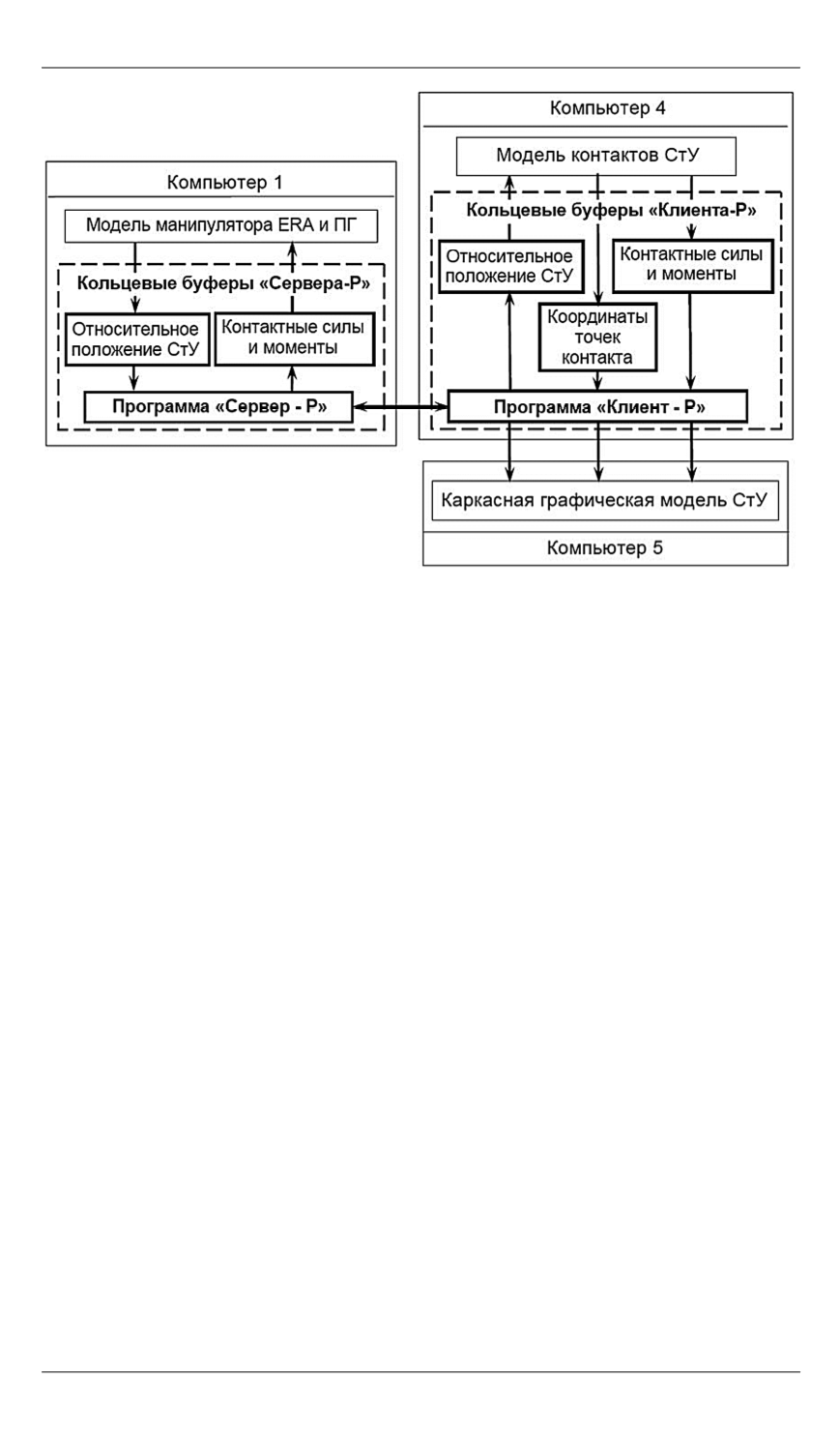
Рис. 4.
Схема взаимодействия математических моделей в реальном времени
при использовании кольцевых буферов


