Рекуррентный алгоритм вычисления коэффициентов уравнений динамики…
9
Заключение.
Получен новый рекуррентный алгоритм расчета
инерционных коэффициентов уравнений динамики в замкнутой фор-
ме.
Его вычислительная эффективность составляет
3
( )
O n
,
это
эф-
фективнее, чем у
других используемых в настоящее время алгорит-
мов. Заметное преимущество достигается при большом числе
звень-
ев, вследствие чего можно
эффективно использовать алгоритм для
расчета динамики манипулятора с учетом упругих деформаций мето-
дом твердотельных конечных элементов. Кроме того, поскольку со-
отношения, описывающие алгоритм
,
вычисляются независимо, при
его реализации предполагается применять параллельные вычисления,
что также повысит его эффективность.
ЛИТЕРАТУРА
[1]
Featherstone R., Orin D. Robot dynamics: equations and algorithms.
Proceed-
ings оf the 2000 IEEE International Conference on Robotics & Automation
,
San Francisco, CA, April 2000, pp. 826–834.
[2]
Степаненко Ю.А. Алгоритм анализа динамики пространственных меха-
низмов с разомкнутой кинематической цепью.
Механика машин
.
Москва,
Наука
, 1974,
вып
. 44,
с
. 77–88.
[3]
Featherstone R. The calculation of robot dynamics using articulated-body iner-
tias.
International Journal of Robotic Research
, vol. 2, no. 1, 1983 pp. 13–30.
[4]
Лесков А.Г., Ющенко А.С
. Моделирование и анализ робототехнических
систем
.
Москва, Машиностроение, 1992, 80 с.
[5]
Kane T.R., Wang C.F
.
On the derivation of equations of motion.
Journal of the
Society of Industrial and applied mathematics
, vol. 13, no. 2, June 1965, pp.
487–492.
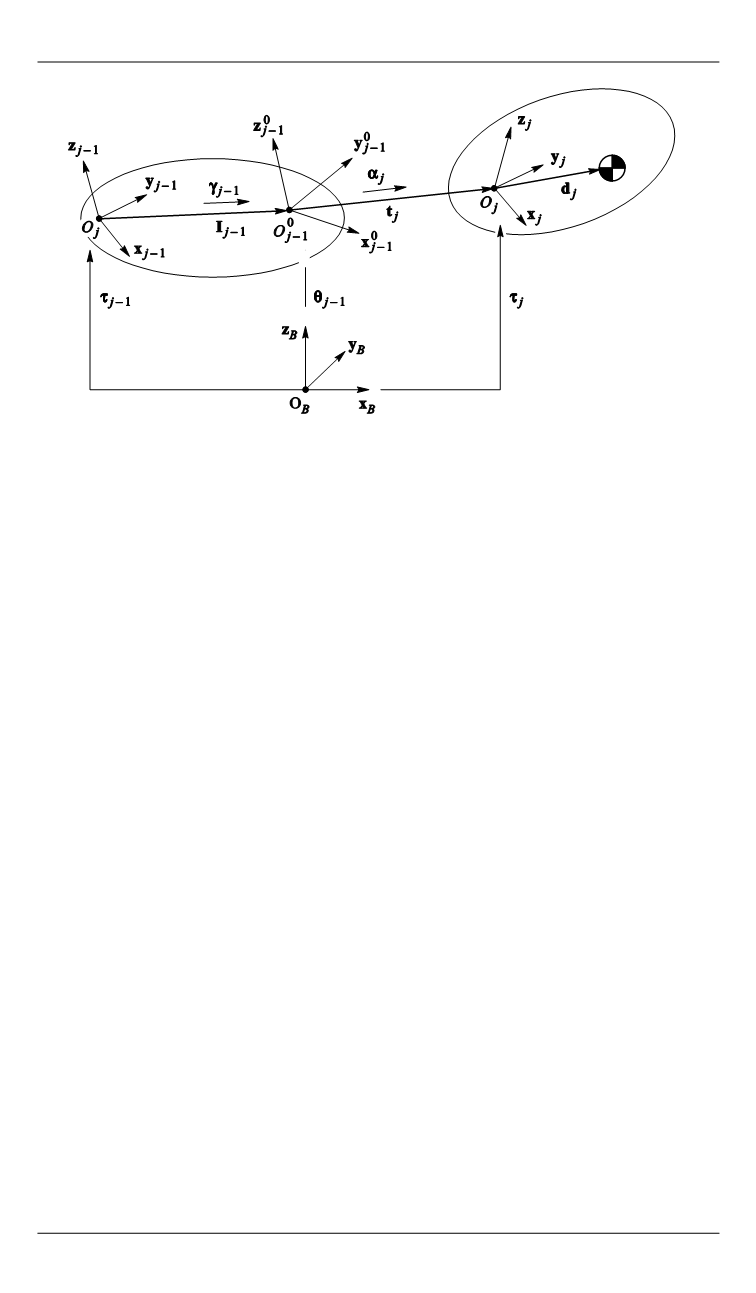
Системы координат смежных тел простой кинематической цепи


