Н.А. Яскевич
6
На основе приведенных выше рекуррентно вычисляемых сумм
определяются непересекающиеся множества элементов симметрич-
ной матрицы обобщенной инерции
( )
A q
размерностью
n n
×
:
,
,
1
( )
,
T
N N
rel
rr
rel
j i
i
i j
j
i
j i
∑
≥
= =
=
∑ ∑
A q
R I R
и непересекающиеся множества элементов вектора обобщенных сил
( , )
b q q
размерностью
n
×1:
1
, 1
1
2
1
1
( , )
;
;
T
T
N
rel
rel
j
j
N N
j
−
∑
∑
=
= +
=
+
∑
b q q b b b
R m R m
( )
( )
2
1
[
].
T
N
rel j
J j
j
j
j
=
=
∑
b
R m
Матрица
( )
A q
симметричная, поэтому элементы, расположенные
ниже главной диагонали
,
определяются из элементов, находящихся
выше главной диагонали.
Сравнительная оценка
вычислительных затрат расчета матрицы
обобщенной инерции простой кинематической цепи, состоящей
из
N
тел
,
с помощью матричной записи ур
а
внений Кейна и уравнений для
рекуррентного алгоритма приведена в таблице
.
Оценка объема вычис-
лений, необходимых для алгоритма «косынка», взята из работы
[6].
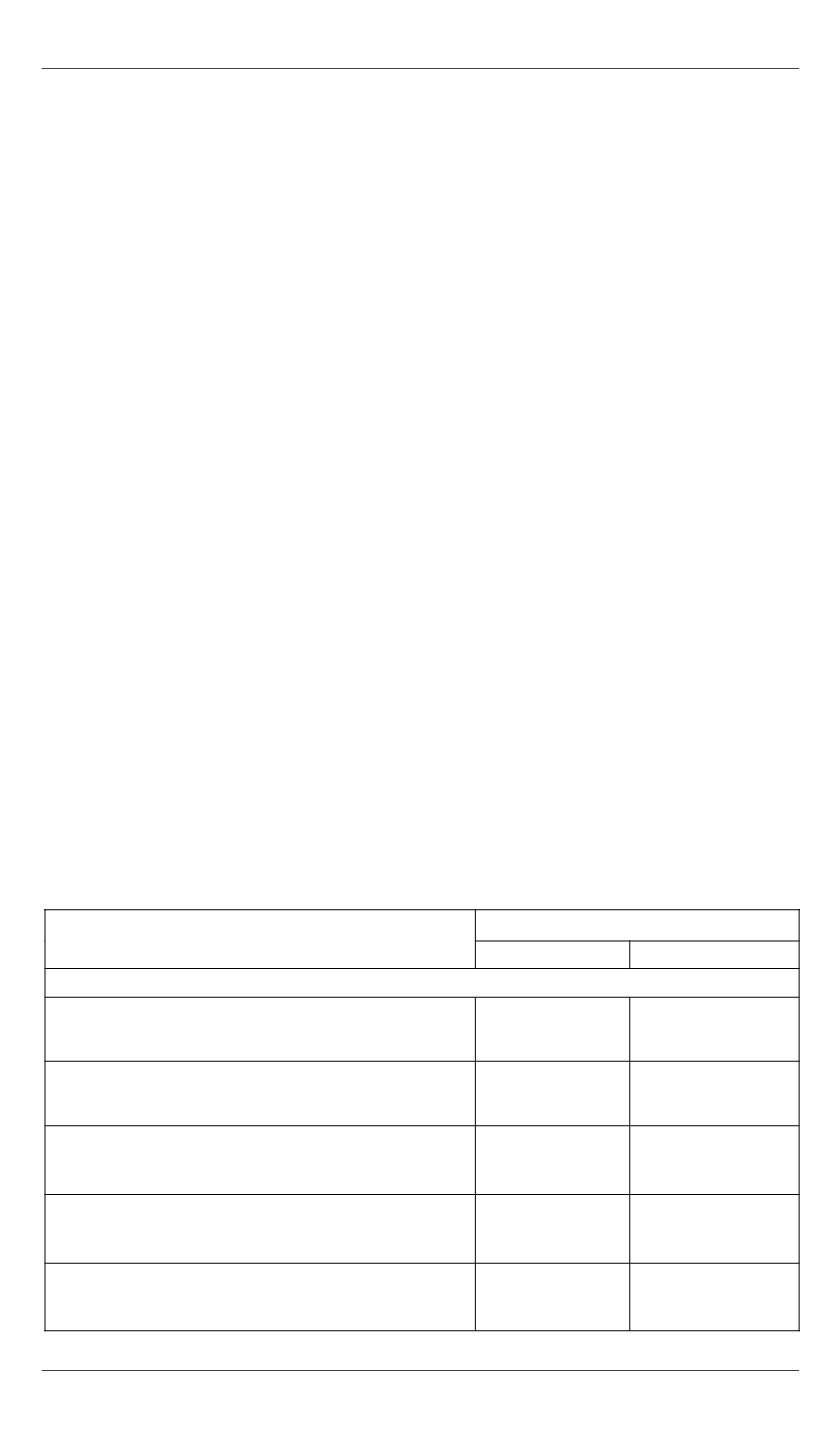
Оценка вычислительных затрат при расчете матрицы обобщенной
инерции для простой кинематической цепи, состоящей из
N
тел, при
наличии только вращательных шарниров
Вектор, матрица
Число
умножений
сложений
Соотношения, общие для двух алгоритмов
1 1
j
j
j
− −
=
θ γ τ
27
N
18
N
j
j
j
=
τ α θ
27
N
18
N
1,
1
1
1
(
)
j
j
j
j
j
j
−
− −
−
=
+
r
τ l
γ t
т
т
18
N
15
N
( )
rel
rel j
j
j
j
=
R θ R
т
9
N
6
N
( )
( )
j
j
j
j
j
m
=
c
d
3
N
0


