1
УДК 62.9.028
Проектирование нечеткого регулятора
следящей системы
© А.А. Бошляков, В.И. Рубцов
МГТУ им. Н.Э. Баумана, Москва, 105005, Россия
Предложен метод построения нечеткого регулятора для следящего привода.
Приведены результаты математического моделирования синтезированной
системы.
Ключевые слова:
нечеткие системы, ПИД-регулятор, корректирующее устройство.
В теории управления большое внимание уделяется синтезу систем
управления при недостаточной информации об объекте управления
и действующих на него полезных сигналов и помех. Один из методов
решения этой проблемы – использование нечетких методов управле-
ния [1]. В качестве корректирующих устройств систем автоматическо-
го управления (САУ) получили широкое распространение пропорцио-
нально интегрально-дифференцирующие (ПИД) регуляторы. Настоящая
статья посвящена проектированию нечетких ПИД-регуляторов для
коррекции следящих систем.
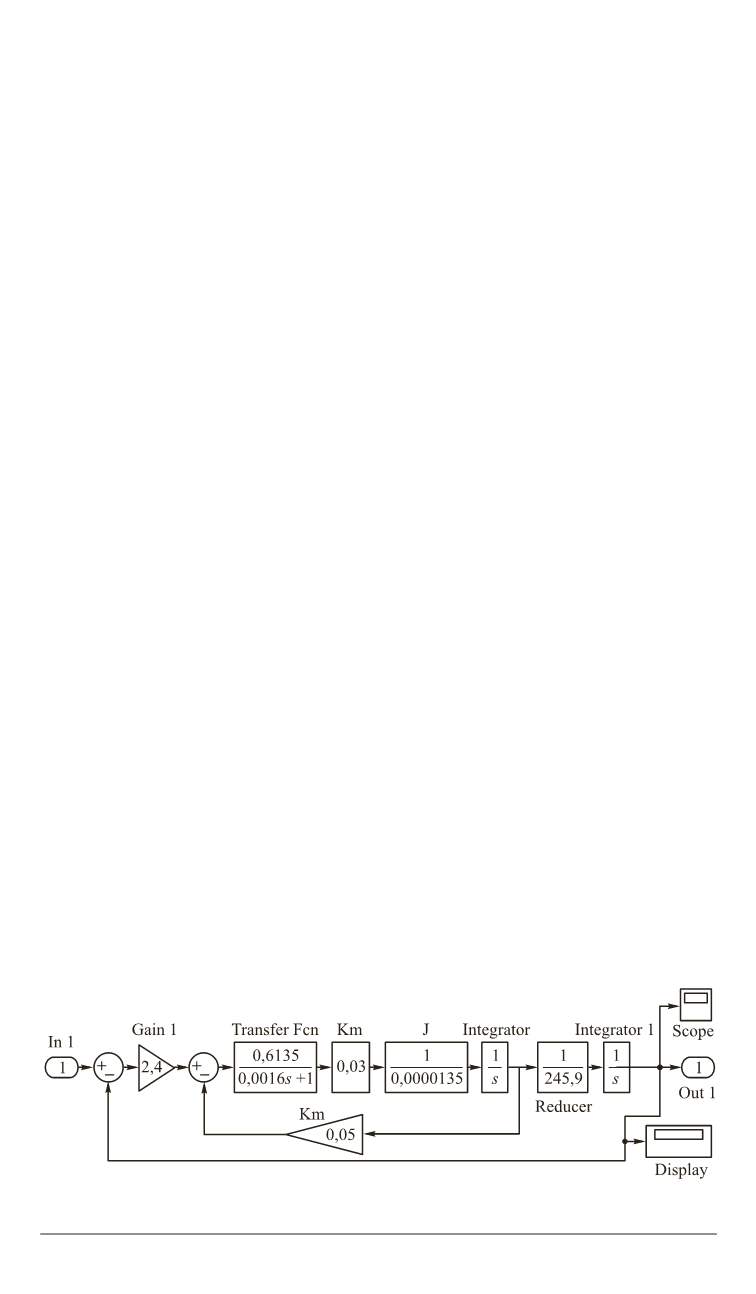
В качестве объекта регулирования выбрали электрический привод
на базе двигателя ДП40-20-4-24-Р11-Д40. Была получена математиче-
ская модель этого привода и его структурная схема в среде MATLAB
Simulink (рис. 1). На основе математического моделирования получены
основные характеристики системы, в частности, график переходного
процесса (рис. 2).
Была поставлена задача снижения времени переходного процесса.
В качестве базовой структуры, формирующей сигнал управления для
САУ, выбран адаптивный ПИД-регулятор, изменение коэффициентов
которого происходит в зависимости от данных получаемых с нечетко-
Рис. 1.
Структурная схема следящего привода


