6
А.А. Бошляков, В.И. Рубцов
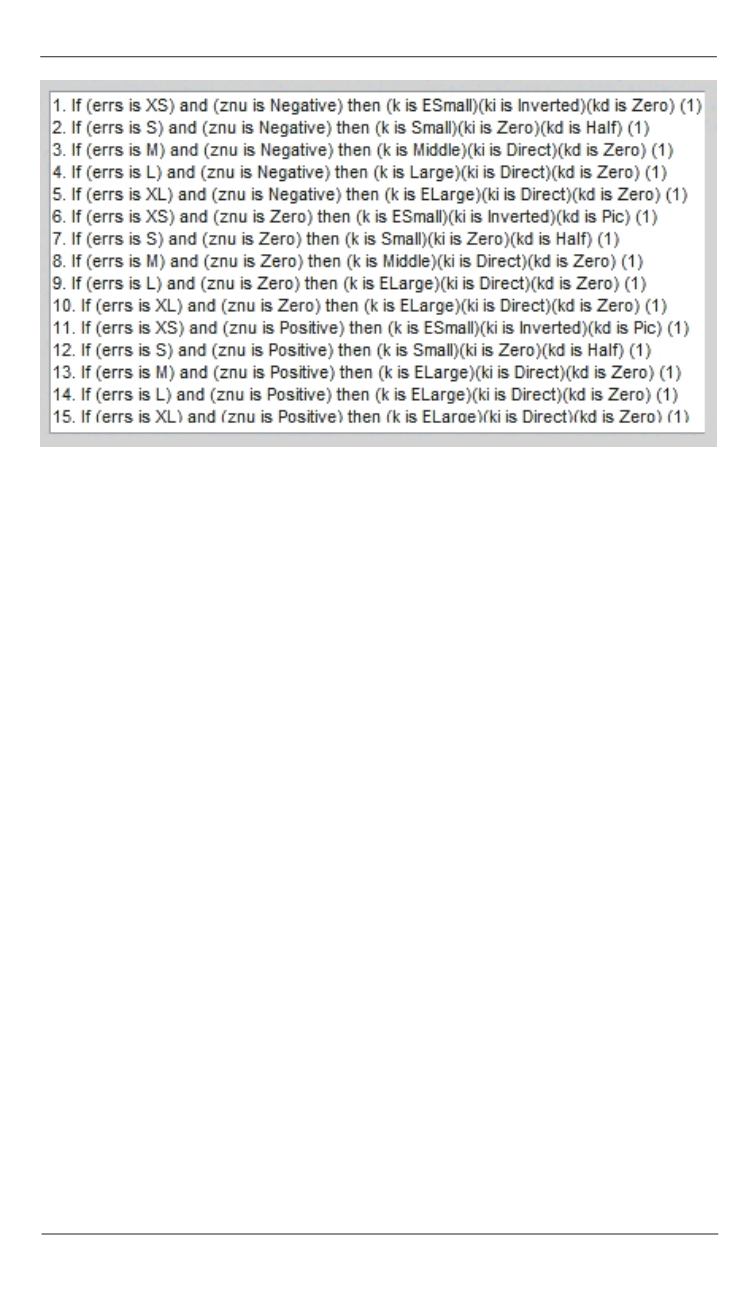
Формирование нечеткой базы знаний контроллера.
Под нечет-
кой базой знаний подразумевается совокупность правил «если – то»,
определяющих взаимосвязь между входными и выходными лингвисти-
ческими переменными контроллера.
В исследуемой системе составляется взаимосвязь между двумя
входными (
Е
и
znu
) и тремя выходными (
K
p
,
K
i
и
K
d
) лингвистическими
переменными. При формировании нечеткой базы знаний контроллера
также выполняются эксперименты в целях корректировки функций
принадлежности лингвистических переменных. В контроллере база
знаний задается непосредственно совокупностью правил «если – то»
с помощью стандартных функций языков программирования. Взаимос-
вязь между входными и выходными лингвистическими переменными
показана на рис. 6.
Исследуя нечеткую базу знаний контроллера и функции принад-
лежности лингвистических переменных (см. рис. 5) нетрудно заметить,
что в контроллере реализуется идея подачи сигнала с регулятора, не-
сколько опережающего происходящие в системе процессы. Так, при
запуске системы коэффициент усиления в пропорциональной цепи по-
вышается, уменьшая время переходного процесса, а при приближении
сигнала к требуемому значению резко снижается, уменьшая перерегу-
лирование в системе.
Составление программы нечеткого логического вывода.
Про-
грамма нечеткого логического вывода представляет собой алгоритм
получения нечетких логических заключений, выражающихся в значе-
ниях выходных лингвистических переменных. Процедура нечеткого
логического вывода происходит на основе нечеткой базы знаний с ис-
пользованием функций принадлежности лингвистических переменных
(см. рис. 4).
Рис. 6.
База правил


