10
А.А. Бошляков, В.И. Рубцов
Например, для указанного выше случая функция принадлежности
некой лингвистической переменной после аккумуляции будет иметь
вид, показанный на рис. 8,
в
. Таким образом, формируется программа
нечеткого логического вывода.
В результате последующей процедуры дефазификации на основе
полученной функции принадлежности формируется выходной четкий
сигнал.
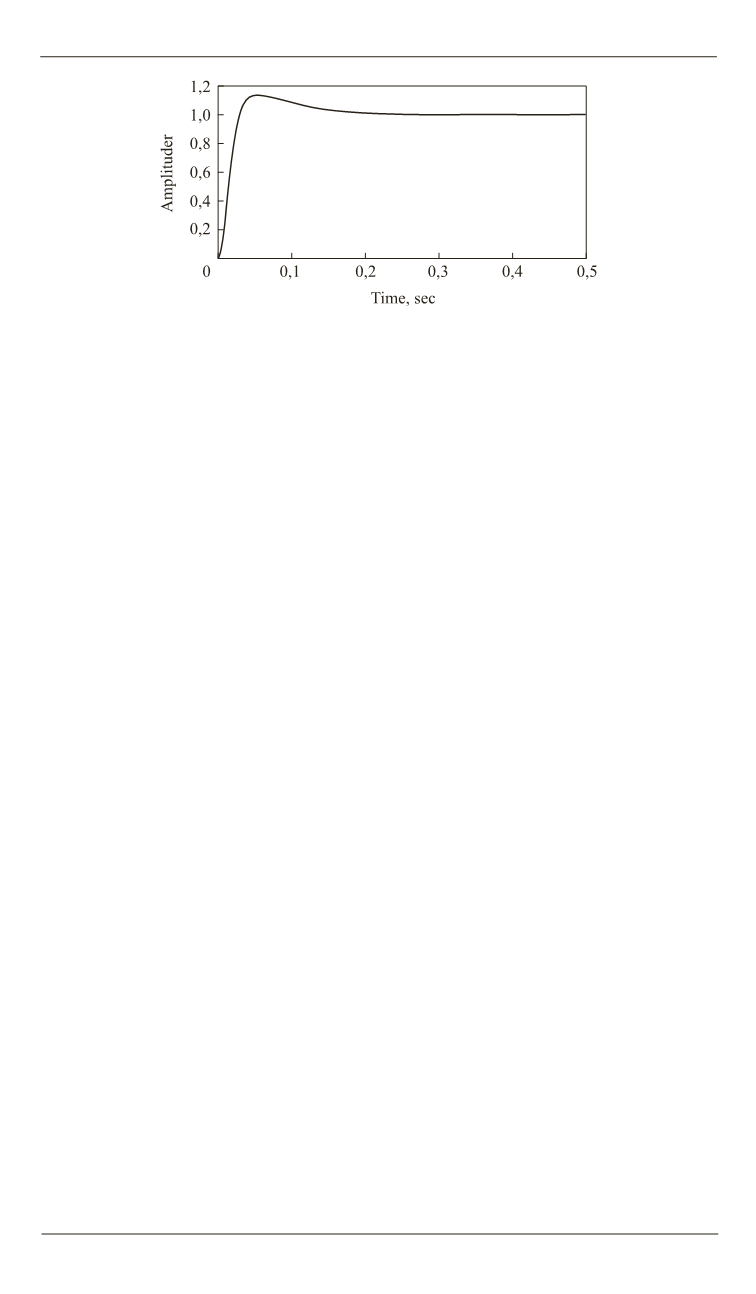
Структурная схема скорректированной нечеткой системы приведе-
на на рис. 9. Проводилось моделирование как линейной, так и нелиней-
ной систем. Результаты приведены на рис. 10. Удалось существенно
снизить время переходного процесса по сравнению с временем этого
же процесса в нескорректированной системе.
Заключение.
В настоящей статье предложен метод проектирования
нечеткого ПИД-регулятора для коррекции мехатронных приводов.
Предложен метод формирования лингвистических переменных при
построении нечеткой модели. Разработаны правила формирования не-
четкой базы знаний контроллера, программа нечеткого логического
вывода. Получена структурная схема скорректированной нечеткой си-
стемы. Приведены результаты математического моделирования в среде
MATLAB Simulink.
ЛИТЕРАТУРА
[1] Заде Л.
Понятие лингвистической переменной и его применение для при-
нятия приближенных решений
. Москва, Мир, 1976, 168 с.
[2] Кудинов Ю.И. Нечеткие системы управления.
Известия Академии наук.
Техническая кибернетика
, 1990, № 5, с. 196–206.
[3] Лохин В.М.
Интеллектуальные системы автоматического управления
.
В.М. Лохин, И.М. Макаров ред. Москва, ФИЗМАТЛИТ, 2001, 576 с.
[4] Захаров В.И., Ульянов В.С. Нечеткие модели интеллектуальных промыш-
ленных регуляторов и систем управления: научно-организационные, техни-
ко-экономические и прикладные аспекты.
Известия Академии наук. Техни-
ческая кибернетика
, 1992, № 5, с. 171–196.
Рис. 10.
График переходного процесса системы с нечетким ПИД-регулятором


