2
А.А. Бошляков, В.И. Рубцов
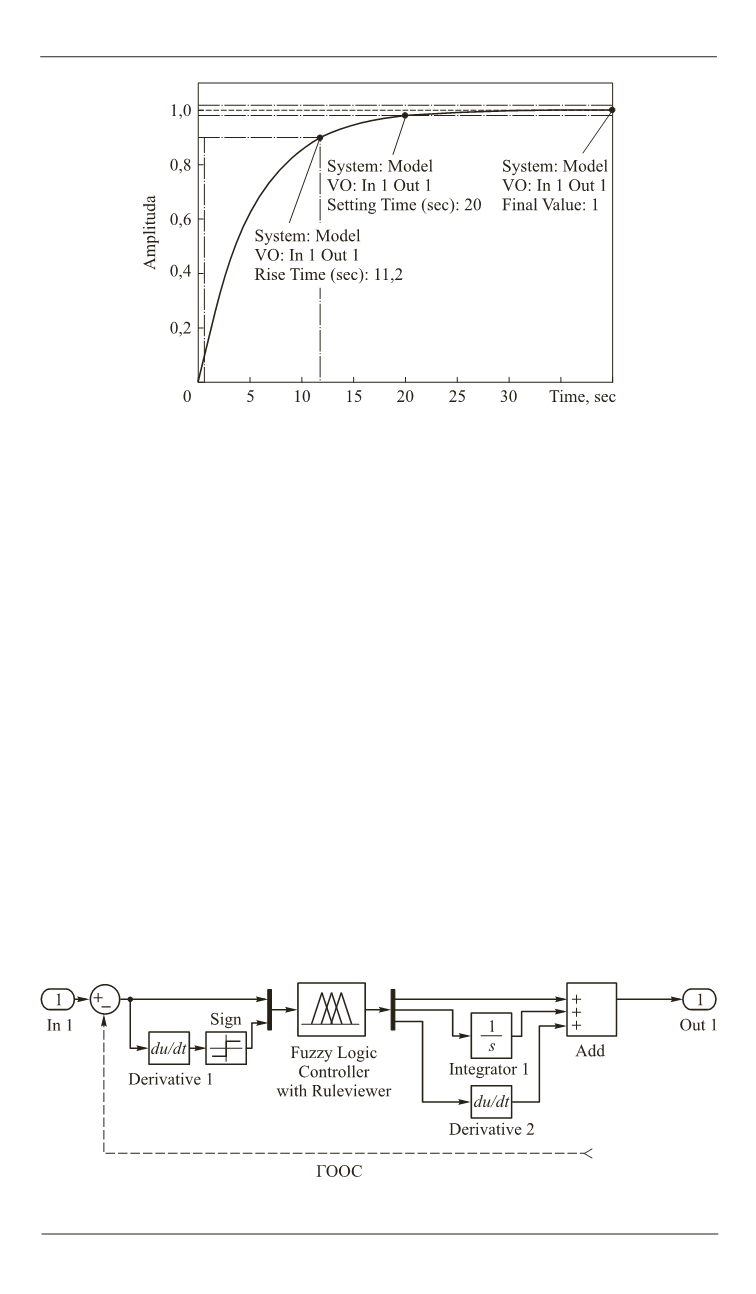
го контроллера. Структурная схема нечеткого ПИД-регулятора приве-
дена на рис. 3. Сигнал, подаваемый на силовую часть цепи, состоит из
пропорциональной, интегральной и дифференциальной частей. Причем
каждая из этих частей регулируется с помощью нечеткой логики в за-
висимости от двух входных переменных нечеткого блока: ошибки
и производной ошибки.
Отличие ПИД-регулятора с контроллером, основанным на нечет-
кой логике, от обычного заключается в том, что коэффициенты уси-
ления в пропорциональной и интегрирующей цепях регулятора не
являются статическими, т. е. зависят от состояния системы в текущий
момент времени. Это позволяет качественно изменить процесс управ-
ления, учесть параметры сигналов в системе (скорость изменения
сигнала, ускорение), а также сделать процесс управления более адап-
тивным.
В системе управления двигателем постоянного тока по скорости
наиболее целесообразно использовать для выбора коэффициентов уси-
ления в регуляторе следующие параметры системы:
ошибка по углу вращения выходного вала привода редуктора;
знак скорости вращения выходного вала привода редуктора;
Рис. 2.
График переходного процесса системы
Рис. 3.
Структурная схема нечеткого ПИД-регулятора


